g1源码之Mixed GC与ConcurrentMark细节详解原创
继上次全面剖析了youngGC的源码后,这次笔者又阅读了关于Mixed GC的部分源码,相对于youngGC,Mixed GC部分更好阅读和理解一些(ps:不知道是不是因为已经有了读youngGC代码的基础),好了话不多说,我们直接来学代码。
首先我们来简单介绍下Mixed GC,之前笔者在介绍youngGC时,将gc的策略分为:
- youngGC
- ConcurrentMark——老年代并发GC(又叫并发模式gc,本文都先称之为老年代并发gc)
- Mixed GC(混合gc)
- FullGC
一.Mixed GC的开始时机
网上关于Mixed GC(混合GC)的解释比较多,但是对其过程描述的比较少,笔者这里将其阶段做个简单的概括,Mixed GC真正开始于YoungGC之后,当这次youngGC结束后回收集合选择器中待回收的总字节数大于阈值,若下一次gc还是youngGC(应该叫Mixed GC了,不过是和youngGC复用了代码,我们先惩治为youngGC),则会将回收集合选择器中的部分回收效率高得老年代和下次youngGC中要回收的region一起回收。
网上很多文件说到mixed gc是一次youngGC和老年代并发gc的循环,其实是不准确的,再源码中真正的mixed gc启动标记其实是再一次young gc结束之后设置的,笔者再这里先把这部分代码贴出来,方便大家对mixed gc的几个关键flag有所认识:
//这个方法笔者之前的young gc的博客中讲到过,是youngGC结束后记录暂停结束的方法
//这个方法中有涉及mixed gc开启的标记
//这个方法笔者后面也会再次提到
void G1CollectorPolicy::record_collection_pause_end(double pause_time_ms, EvacuationInfo& evacuation_info) {
......
//_last_young_gc只有在老年代并发gc的cleanup阶段结束后会设置为true
if (_last_young_gc) {
//如果是youngGC且不是老年代并发GC的初次标记阶段,则判断下次gc是否进行mixed gc
//这里可以看出mixed gc和老年代并发gc不是同时进行的
if (!last_pause_included_initial_mark) {
//判断下次gc是否应该执行mixed gc(这里主要是判断回收集合选择器CollectionSetChooser上待回收的
//字节数是否大于设定的阈值)
if (next_gc_should_be_mixed("start mixed GCs",
"do not start mixed GCs")) {
//gcs_are_young=false标志着mixed gc的开始
set_gcs_are_young(false);
}
} else {
......
}
_last_young_gc = false;
}
//如果上次gc不是youngGC 即是mixed gc
if (!_last_gc_was_young) {
// 证明正在进行mixed gc 判断是否需要继续执行mixed gc
if (!next_gc_should_be_mixed("continue mixed GCs",
"do not continue mixed GCs")) {
//如果不需要继续进行,则设置gcs_are_young=true结束mixed gc
set_gcs_are_young(true);
}
}
......
}
从源码我们可以看出 gcs_are_young这个标记其实就是是否开启mixed gc的关键,当gcs_are_young为true则表示要进行youngGC,当gcs_are_young为false则证明要进行mixed GC。
这里我们画张图来方便理解下:
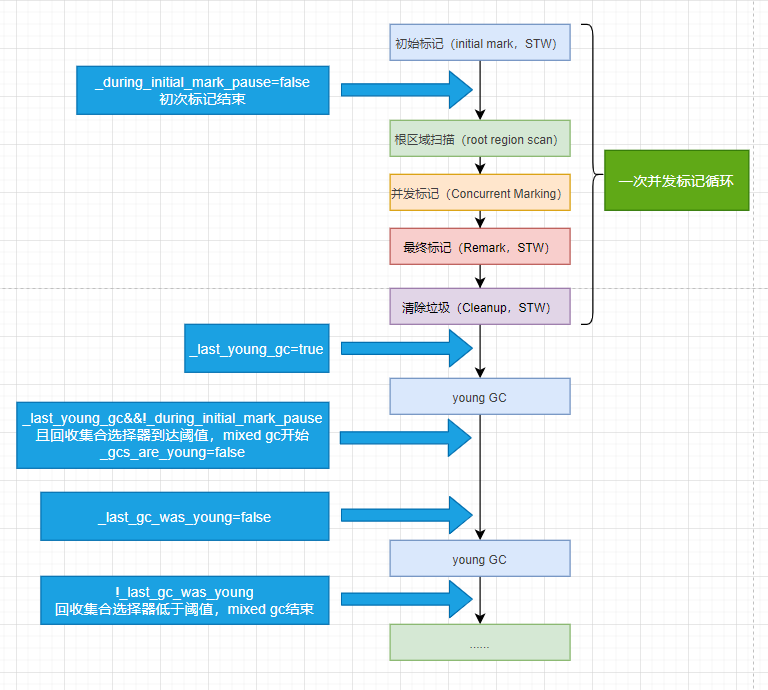
图中我们可以看出mixed GC是在两次youngGC(第二次youngGC其实是Mixed GC)之间进行的,大家可能有疑问了,为什么笔者画还要在图中画出一次老年代GC呢?
因为在老年代并发GC的时候,JVM会将回收效率比较高的但还有存活对象的old region放入回收集合选择器中,方便下次mixed gc回收。笔者这样画主要想表达,mixed gc和老年代并发gc虽然不是同时进行,但是也是相互关联的,只有老年代并发gc扫描完老年代发现回收效率高的但还有存活对象的old region时,才能在下次mixed gc时将存活对象copy到其他old region中,并进行回收。可以理解为更高效率更精准的回收部分老年代的策略。
二.ConcurrentMark与Mixed GC
刚刚我们提到了,mixed gc和老年代并发gc是有相互关联的,所以要想了解mixed gc我们还得从老年代并发gc说起。老年代并发GC顾名思义,主要是用来回收old region的gc策略。老年代并发gc是由ConcurrentMarkThread线程并发执行的,ConcurrentMarkThread线程是在g1 heap初始化的时候创建的,关于ConcurrentMarkThread的线程创建笔者这里就不过多阐述,我们主要来看看其相关启动标记和执行任务的run()方法。
1.ConcurrentMark启动相关标记
关于ConcurrentMark的启动相关标记开启的两个关键方法是need_to_start_conc_mark()和set_initiate_conc_mark_if_possible() 我们来一起看下源码:
//第一个参数是开始并发标记的原因,第二个参数是需要
bool G1CollectorPolicy::need_to_start_conc_mark(const char* source, size_t alloc_word_size) {
//判断是否正在一个并发标记周期中,如果在则直接返回
if (_g1->concurrent_mark()->cmThread()->during_cycle()) {
return false;
}
size_t marking_initiating_used_threshold =
(_g1->capacity() / 100) * InitiatingHeapOccupancyPercent;
//获取当前使用的非young region总字节数
size_t cur_used_bytes = _g1->non_young_capacity_bytes();
//需要申请的空间大小
size_t alloc_byte_size = alloc_word_size * HeapWordSize;
//非young region的总字节数和需要申请的空间大于阈值
if ((cur_used_bytes + alloc_byte_size) > marking_initiating_used_threshold) {
//熟悉的gcs_are_young和_last_young_gc
//gcs_are_young表示当前是youngGC阶段
//_last_young_gc表示当前是否是mixed gc之前的最后一次youngGC
if (gcs_are_young() && !_last_young_gc) {
return true;
} else {
}
}
return false;
}
//当need_to_start_conc_mark返回true时会调用这个方法,表示如果由必要的化就初始化并发标记
void set_initiate_conc_mark_if_possible() { _initiate_conc_mark_if_possible = true; }
笔者这里画个图将老年代并发gc标记启动的场景表示出来:
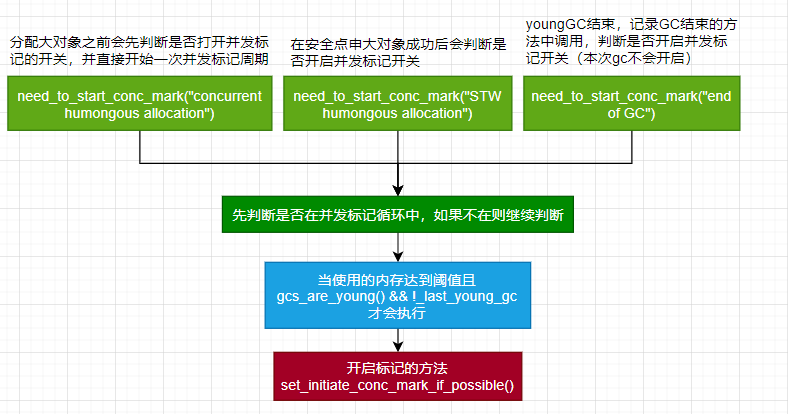
我们可以看出老年代并发gc是否开启的关键是need_to_start_conc_mark()方法,其若返回true,之后会调用set_initiate_conc_mark_if_possible()方法表示下次gc会开启老年代并发gc。
2.ConcurrentMark的启动
知道了ConcurrentMark的启动标记,我们就可以看ConcurrentMark的相关源码了,众所周知ConcurrentMark周期中包括初次标记,我们通常认为初次标记和youngGC是大体一样的,事实上在源码中他们也相互共用了部分代码,之前的笔者的讲述youngGC博客(https://my.oschina.net/u/3645114/blog/5119362)中已经提到了(不得不感叹,youngGC才是g1源码中的基础,强烈推荐大家去看),本篇博客中笔者只把youngGC中关于是否开启ConcurrentMark的内容贴出来,其他部分就先忽略:
//Younggc和初次标记共用的方法
bool
G1CollectedHeap::do_collection_pause_at_safepoint(double target_pause_time_ms) {
......
///这个方法将会决定此次youngGC是不是一次初次标记
//(即老年代并发垃圾回收时,会伴随一次youngGC,此时会返回true)
g1_policy()->decide_on_conc_mark_initiation();
......
//获取本次gc是否是老年代并发gc的初次标记
bool should_start_conc_mark = g1_policy()->during_initial_mark_pause();
......
//初次标记方法
evacuate_collection_set(evacuation_info);
......
//获取本次gc是否是老年代并发gc的初次标记
if (g1_policy()->during_initial_mark_pause()) {
//这个方法会后面还会提到,会判断是否有需要扫描的根区域,这里我们先注意一下
concurrent_mark()->checkpointRootsInitialPost();
//如果是则标记开始标记 _mark_in_progress = true;
set_marking_started();
}
......
//记录回收结束的方法
g1_policy()->record_collection_pause_end(pause_time_ms, evacuation_info);
......
//根据should_start_conc_mark判断是否开始并发标记
if (should_start_conc_mark) {
doConcurrentMark();
}
return true;
}
//我们先看看记录回收结束的方法,这个方法比较长,笔者将其中的部分贴出来
//这是youngGC(初次标记)结束后调用的
void G1CollectorPolicy::record_collection_pause_end(double pause_time_ms, EvacuationInfo& evacuation_info) {
//熟悉的方法
last_pause_included_initial_mark = during_initial_mark_pause();
if (last_pause_included_initial_mark) {
record_concurrent_mark_init_end(0.0);
//如果last_pause_included_initial_mark=false表示当前gc为youngGC
//这个方法就是笔者刚刚图中标注的youngGC结束后调用的need_to_start_conc_mark方法
} else if (need_to_start_conc_mark("end of GC")) {
//这个方法即表示下次gc会开启并发标记
set_initiate_conc_mark_if_possible();
}
......
//可以看到这里出现了 _last_young_gc和 gcs_are_young
//这里表示的是mixed gc和young gc策略之间的切换,发生在youngGC(初次标记后)
//这部分前面讲过笔者就不继续论述
if (_last_young_gc) {
if (!last_pause_included_initial_mark) {
if (next_gc_should_be_mixed("start mixed GCs",
"do not start mixed GCs")) {
set_gcs_are_young(false);
}
} else {
}
_last_young_gc = false;
}
if (!_last_gc_was_young) {
if (!next_gc_should_be_mixed("continue mixed GCs",
"do not continue mixed GCs")) {
set_gcs_are_young(true);
}
}
......
}
//之后我们看看这个方法decide_on_conc_mark_initiation
//这个是YoungGC(初次标记)前调用的
void
G1CollectorPolicy::decide_on_conc_mark_initiation() {
//可以看到这里判断的是initiate_conc_mark_if_possible标记
//如果为true才会继续
if (initiate_conc_mark_if_possible()) {
bool during_cycle = _g1->concurrent_mark()->cmThread()->during_cycle();
//当前如果不在并发标记周期则继续
if (!during_cycle) {
//将during_initial_mark_pause设置为true表示当前为初次标记,即并发标记周期
//我们可以看到之后所有调during_initial_mark_pause()的方法都返回true
set_during_initial_mark_pause();
//这里表示如果我们当前是mixedGC则将设置gcs_are_young=true
//即老年代并发标记和mixed GC不同时进行
if (!gcs_are_young()) {
set_gcs_are_young(true);
}
//重置initiate_conc_mark_if_possible标记
clear_initiate_conc_mark_if_possible();
} else {
//打日志
}
}
}
看到这里,就可以映证笔者开篇描述的几个关于mixed gc的标记了。
之前提到过ConcurrentMark是由ConcurrentMarkThread线程并发执行的,而ConcurrentMark分为以下几个步骤:
- 初始标记(initial mark,STW)
- 根区域扫描(root region scan)
- 并发标记(Concurrent Marking)
- 最终标记(Remark,STW)
- 清除垃圾(Cleanup,STW)
- 并发清除(Concurrent Cleanup)
2.1 根区域扫描(root region scan)
初始标记和youngGC是共用的方法,这里就不过多阐述,我们直接来看后面的代码:
//先看doConcurrentMark的方法
void
G1CollectedHeap::doConcurrentMark() {
MutexLockerEx x(CGC_lock, Mutex::_no_safepoint_check_flag);
//如果工作线程不在执行则将启动标记改为true,_cmThread是ConcurrentMarkThread线程
if (!_cmThread->in_progress()) {
_cmThread->set_started();
//这里可以理解为将线程唤醒
CGC_lock->notify();
}
}
//ConcurrentMarkThread的run方法执行并发Gc任务的方法
void ConcurrentMarkThread::run() {
//初始化线程
//主要是初始化栈和 thread_local_storage(不是java的threadLocal)
initialize_in_thread();
_vtime_start = os::elapsedVTime();
//等待universe(即jvm初始化类,防止jvm还未初始化线程就启动)初始化完毕
wait_for_universe_init();
G1CollectedHeap* g1h = G1CollectedHeap::heap();
G1CollectorPolicy* g1_policy = g1h->g1_policy();
G1MMUTracker *mmu_tracker = g1_policy->mmu_tracker();
Thread *current_thread = Thread::current();
//_should_terminate=true表示线程停止了
while (!_should_terminate) {
// 在下一个循环到来之前Sleep
sleepBeforeNextCycle();
{
ResourceMark rm;
HandleMark hm;
double cycle_start = os::elapsedVTime();
double scan_start = os::elapsedTime();
//在老年代并发线程的运行过程中会经常判断这个方法
//其意义是判断老年代并发标记是否被其他工作终止(比如发生了full gc)
//has_aborted()返回true则证明被终止
if (!cm()->has_aborted()) {
......
//第二步 根区域扫描(root region scan)
_cm->scanRootRegions();
......
}
......
int iter = 0;
do {
iter++;
//如果没被终止则进行并发标记(Concurrent Marking)
if (!cm()->has_aborted()) {
_cm->markFromRoots();
}
......
if (!cm()->has_aborted()) {
......
//最终标记(Remark,STW)
CMCheckpointRootsFinalClosure final_cl(_cm);
VM_CGC_Operation op(&final_cl, "GC remark", true /* needs_pll */);
VMThread::execute(&op);
}
......
//restart_for_overflow这个标记判断全局栈是否溢出,如果溢出则应该启动
//另一个并发标记(Concurrent Marking)阶段即再循环
} while (cm()->restart_for_overflow());
......
if (!cm()->has_aborted()) {
if (g1_policy->adaptive_young_list_length()) {
double now = os::elapsedTime();
double cleanup_prediction_ms = g1_policy->predict_cleanup_time_ms();
jlong sleep_time_ms = mmu_tracker->when_ms(now, cleanup_prediction_ms);
os::sleep(current_thread, sleep_time_ms, false);
}
//清除垃圾(Cleanup,STW)
CMCleanUp cl_cl(_cm);
VM_CGC_Operation op(&cl_cl, "GC cleanup", false /* needs_pll */);
VMThread::execute(&op);
} else {
_sts.join();
g1h->set_marking_complete();
_sts.leave();
}
//free_regions_coming()表示是否有region被回收,判断你是否需要并发cleanup
if (g1h->free_regions_coming()) {
......
//并发真正完成cleanup
_cm->completeCleanup();
//重置标记
g1h->reset_free_regions_coming();
......
}
......
//记录老年代并发gc清理结束的方法
if (!cm()->has_aborted()) {
g1_policy->record_concurrent_mark_cleanup_completed();
}
......
//清理NTAMS bitMap
_cm->clearNextBitmap();
......
}
......
//这个方法会做一些统计并清理_in_progress标记
g1h->increment_old_marking_cycles_completed(true /* concurrent */);
g1h->register_concurrent_cycle_end();
......
}
terminate();
}
上面就是老年代并发gc的整个执行任务的方法,其包括了ConcurrentMark除初次标记的整个流程,下面笔者会把几个主要的方法全部展开看看。
首先是sleepBeforeNextCycle()方法,这个方法可以理解为在并发标记任务触发前线程先等待的逻辑:
//这个方法的意义是根据标记判断是否启动任务
//如果启动则暂时挂起
void ConcurrentMarkThread::sleepBeforeNextCycle() {
MutexLockerEx x(CGC_lock, Mutex::_no_safepoint_check_flag);
//判断started标记,如果为false则sleep等待唤醒
while (!started()) {
//这里是等待方法和之前笔者doConcurrentMark方法中的唤醒方法呼应
//doConcurrentMark方法会先设置started=true并唤醒线程去判断started标记
CGC_lock->wait(Mutex::_no_safepoint_check_flag);
}
//设置progress标记为true
set_in_progress();
//重置started标记
clear_started();
}
然后我们来看看ConcurrentMark(老年代并发gc)周期中的第二步根区域扫描(root region scan):
void ConcurrentMark::scanRootRegions() {
//当至少又一个根区域需要进行扫描时
//scan_in_progress会被设置为true(在初次标记的checkpointRootsInitialPost方法中会判断并设置)
if (root_regions()->scan_in_progress()) {
_parallel_marking_threads = calc_parallel_marking_threads();
uint active_workers = MAX2(1U, parallel_marking_threads());
//创建并运行扫描任务
CMRootRegionScanTask task(this);
if (use_parallel_marking_threads()) {
_parallel_workers->set_active_workers((int) active_workers);
_parallel_workers->run_task(&task);
} else {
task.work(0);
}
root_regions()->scan_finished();
}
}
这里涉及到一个概念根区域,笔者在这里做下解释:我们都知道在初次标记阶段,jvm会扫描整个eden区,并把存活的对象copy到survior区,而根区域即所有的survior区。
我们继续看CMRootRegionScanTask的扫描任务方法:
//CMRootRegionScanTask的扫描方法
void work(uint worker_id) {
//_cm是创建CMRootRegionScanTask传入的ConcurrentMark类,其包含了ConcurrentMarkThread线程类
//也包含了根区域的引用,这里就是获取全部region
CMRootRegions* root_regions = _cm->root_regions();
//遍历所有根区域region
HeapRegion* hr = root_regions->claim_next();
while (hr != NULL) {
//我们看看这个扫描region的方法
_cm->scanRootRegion(hr, worker_id);
hr = root_regions->claim_next();
}
}
//扫描region的方法
void ConcurrentMark::scanRootRegion(HeapRegion* hr, uint worker_id) {
//创建扫描根区域region对象的闭包
G1RootRegionScanClosure cl(_g1h, this, worker_id);
//计算region范围
......
while (curr < end) {
Prefetch::read(curr, interval);
oop obj = oop(curr);
//这个迭代方法会调用一系列宏命令遍历对象,最终会用我们传入的闭包遍历,我们直接看下闭包的处理方法
int size = obj->oop_iterate(&cl);
curr += size;
}
}
//最后调用G1RootRegionScanClosure的do_oop_nv方法
template <class T>
inline void G1RootRegionScanClosure::do_oop_nv(T* p) {
T heap_oop = oopDesc::load_heap_oop(p);
if (!oopDesc::is_null(heap_oop)) {
oop obj = oopDesc::decode_heap_oop_not_null(heap_oop);
HeapRegion* hr = _g1h->heap_region_containing((HeapWord*) obj);
if (hr != NULL) {
//标记成会灰色
_cm->grayRoot(obj, obj->size(), _worker_id, hr);
}
}
}
最终定位到了grayRoot方法,这个方法是用来将对象染灰(即三色表记法中的染灰),我们来看看这个方法:
inline bool ConcurrentMark::par_mark_and_count(oop obj,size_t word_size,HeapRegion* hr,
uint worker_id) {
HeapWord* addr = (HeapWord*)obj;
//在NTAMS位图中进行标记
if (_nextMarkBitMap->parMark(addr)) {
MemRegion mr(addr, word_size);
//这个方法会根据worker_id找到当前的任务类,会记录当前任务类标记处理的统计数据
//包括一个全局card位图和一个标记byte数组
count_region(mr, hr, worker_id);
return true;
}
return false;
}
我们可以看到在jvm中标记成灰色的概念就是在NTAMS位图中进行标记,这个NTAMS位图是全局维度的。这里先做一个小总结,从源码中我们看到ConcurrentMark类会判断是否并行创建CMRootRegionScanTask任务类,用工作线程去执行CMRootRegionScanTask任务类去扫描所有的根区域的对象并进行标记,标记体现在全局的NTAMS位图中。
2.2 并发标记(Concurrent Marking)
我们继续回归主线,看老年代并发gc的第三步并发标记(Concurrent Marking):
void ConcurrentMark::markFromRoots() {
//重置溢出重新启动标记
_restart_for_overflow = false;
force_overflow_conc()->init();
_parallel_marking_threads = calc_parallel_marking_threads();
uint active_workers = MAX2(1U, parallel_marking_threads());
// 在这个方法中设置并行任务结束符
set_concurrency_and_phase(active_workers, true /* concurrent */);
//并发标记(Concurrent Marking)任务类
CMConcurrentMarkingTask markingTask(this, cmThread());
//根据并行策略执行
if (use_parallel_marking_threads()) {
_parallel_workers->set_active_workers((int)active_workers);
_parallel_workers->run_task(&markingTask);
} else {
markingTask.work(0);
}
print_stats();
}
和根区域扫描(root region scan)类似,也是通过创建任务类,然后执行,我们直接跳到任务类的work()方法:
//CMConcurrentMarkingTask的work方法
void work(uint worker_id) {
ResourceMark rm;
double start_vtime = os::elapsedVTime();
ConcurrentGCThread::stsJoin();
//这里根据worder_id获取并发标记任务
CMTask* the_task = _cm->task(worker_id);
the_task->record_start_time();
if (!_cm->has_aborted()) {
do {
......
//执行标记步骤,第一个参数是标记超时时间
the_task->do_marking_step(mark_step_duration_ms,
true /* do_termination */,
false /* is_serial*/);
......
//清理溢出标记
_cm->clear_has_overflown();
......
//这里的两个条件一个是代表老年代并发gc是否终止,一个代表并发标记任务是否终止
} while (!_cm->has_aborted() && the_task->has_aborted());
}
......
}
//这个方法是标记的主要方法,在remark阶段也会调用
void CMTask::do_marking_step(double time_target_ms,
bool do_termination,
bool is_serial) {
......
//清除并发任务终止的flag和其他flag
clear_has_aborted();
_has_timed_out = false;
_draining_satb_buffers = false;
++_calls;
//后面的所有情况都是用这两个闭包遍历对象
CMBitMapClosure bitmap_closure(this, _cm, _nextMarkBitMap);
G1CMOopClosure cm_oop_closure(_g1h, _cm, this);
set_cm_oop_closure(&cm_oop_closure);
//判断是否溢出,如果溢出则设置任务终止标记
if (_cm->has_overflown()) {
set_has_aborted();
}
//处理satb缓冲区
drain_satb_buffers();
//处理标记任务的本地队列和所有标记任务的全局栈
//这里可以理解为
drain_local_queue(true);
drain_global_stack(true);
do {
//未扫描前这里 _curr_region是Null,会先执行后面的代码,选择一个姚遍历的region
if (!has_aborted() && _curr_region != NULL) {
update_region_limit();
//从finger开始到结束
MemRegion mr = MemRegion(_finger, _region_limit);
//根据region的不同处理
//为空
if (mr.is_empty()) {
giveup_current_region();
regular_clock_call();
//大region
} else if (_curr_region->isHumongous() && ......) {
if (_nextMarkBitMap->isMarked(mr.start())) {
BitMap::idx_t offset = _nextMarkBitMap->heapWordToOffset(mr.start());
bitmap_closure.do_bit(offset);
}
giveup_current_region();
regular_clock_call();
//其他情况
} else if (_nextMarkBitMap->iterate(&bitmap_closure, mr)) {
giveup_current_region();
regular_clock_call();
} else {
HeapWord* new_finger = _nextMarkBitMap->nextObject(_finger);
if (new_finger >= _region_limit) {
giveup_current_region();
} else {
move_finger_to(new_finger);
}
}
}
//到这里要不然就是被终止,要不然已经处理完当前region
//之后处理完本地队列和全局栈
drain_local_queue(true);
drain_global_stack(true);
//获取一个region
while (!has_aborted() && _curr_region == NULL && !_cm->out_of_regions()) {
//这个方法会根据全局finger获取一个region
//范围是整个堆的region
HeapRegion* claimed_region = _cm->claim_region(_worker_id);
if (claimed_region != NULL) {
statsOnly( ++_regions_claimed );
//将新的region加载到标记任务类中
setup_for_region(claimed_region);
}
regular_clock_call();
}
//遍历直到_curr_region为空或者被终止
} while ( _curr_region != NULL && !has_aborted());
if (!has_aborted()) {
//处理satb
drain_satb_buffers();
}
//再处理本地队列和全局栈
drain_local_queue(false);
drain_global_stack(false);
//自己的任务处理完了,判断是否可以去偷别的线程的任务,我们跳过不看
......
//到这里还没有被终止,则执行终止操作
if (do_termination && !has_aborted()) {
_termination_start_time_ms = os::elapsedVTime() * 1000.0;
bool finished = (is_serial ||
_cm->terminator()->offer_termination(this));
double termination_end_time_ms = os::elapsedVTime() * 1000.0;
_termination_time_ms +=
termination_end_time_ms - _termination_start_time_ms;
//成功终止
if (finished) {
if (_worker_id == 0) {
if (concurrent()) {
_cm->clear_concurrent_marking_in_progress();
}
}
} else {
//终止失败,证明还有任务需要处理,我们先终止它,之后会重新启动
set_has_aborted();
statsOnly( ++_aborted_termination );
}
}
//清除闭包
set_cm_oop_closure(NULL);
......
//完成后的一些收尾工作
if (has_aborted()) {
statsOnly( ++_aborted );
//判断是否超时
if (_has_timed_out) {
double diff_ms = elapsed_time_ms - _time_target_ms;
_marking_step_diffs_ms.add(diff_ms);
}
//判断是否全局栈是否溢出
if (_cm->has_overflown()) {
if (!is_serial) {
_cm->enter_first_sync_barrier(_worker_id);
}
statsOnly( ++_aborted_overflow );
clear_region_fields();
if (!is_serial) {
_cm->enter_second_sync_barrier(_worker_id);
}
}
_claimed = false;
}
这一段代码比较长,分别是处理stab队列和遍历所有的region,最终使用的处理方法都是一样的,我们先看看如何处理stab队列:
//处理Satb缓冲区
void CMTask::drain_satb_buffers() {
if (has_aborted()) return;
//设置标记表示正在处理satb缓冲区,即队列
_draining_satb_buffers = true;
//遍历的闭包
CMObjectClosure oc(this);
//SATB标记队列和Dcqs(不清楚的可以看笔者的上篇博客)构造差不多
//我们直接看遍历闭包
SATBMarkQueueSet& satb_mq_set = JavaThread::satb_mark_queue_set();
if (G1CollectedHeap::use_parallel_gc_threads()) {
satb_mq_set.set_par_closure(_worker_id, &oc);
} else {
satb_mq_set.set_closure(&oc);
}
//处理satb队列
if (G1CollectedHeap::use_parallel_gc_threads()) {
while (!has_aborted() &&
satb_mq_set.par_apply_closure_to_completed_buffer(_worker_id)) {
if (_cm->verbose_medium()) {
gclog_or_tty->print_cr("[%u] processed an SATB buffer", _worker_id);
}
statsOnly( ++_satb_buffers_processed );
regular_clock_call();
}
} else {
while (!has_aborted() &&
satb_mq_set.apply_closure_to_completed_buffer()) {
if (_cm->verbose_medium()) {
gclog_or_tty->print_cr("[%u] processed an SATB buffer", _worker_id);
}
statsOnly( ++_satb_buffers_processed );
regular_clock_call();
}
}
//前面提到CMTask::do_marking_step这个方法在remark阶段也会调用
//这里只有remark阶段会进行,清空satb缓冲区
if (!concurrent() && !has_aborted()) {
if (G1CollectedHeap::use_parallel_gc_threads()) {
satb_mq_set.par_iterate_closure_all_threads(_worker_id);
} else {
satb_mq_set.iterate_closure_all_threads();
}
}
......
}
//CMObjectClosure闭包的遍历方法
void do_object(oop obj) {
//调用这个方法进行对象的遍历
_task->deal_with_reference(obj);
}
再来看看遍历region的闭包,其实也是调用这个方法deal_with_reference():
//CMBitMapClosure遍历的闭包方法
bool do_bit(size_t offset) {
......
_task->move_finger_to(addr);
//这个方法会调用G1CMOopClosure闭包遍历
_task->scan_object(oop(addr));
_task->drain_local_queue(true);
_task->drain_global_stack(true);
return !_task->has_aborted();
}
//G1CMOopClosure闭包遍历
template <class T>
inline void G1CMOopClosure::do_oop_nv(T* p) {
oop obj = oopDesc::load_decode_heap_oop(p);
//处理obj
_task->deal_with_reference(obj);
}
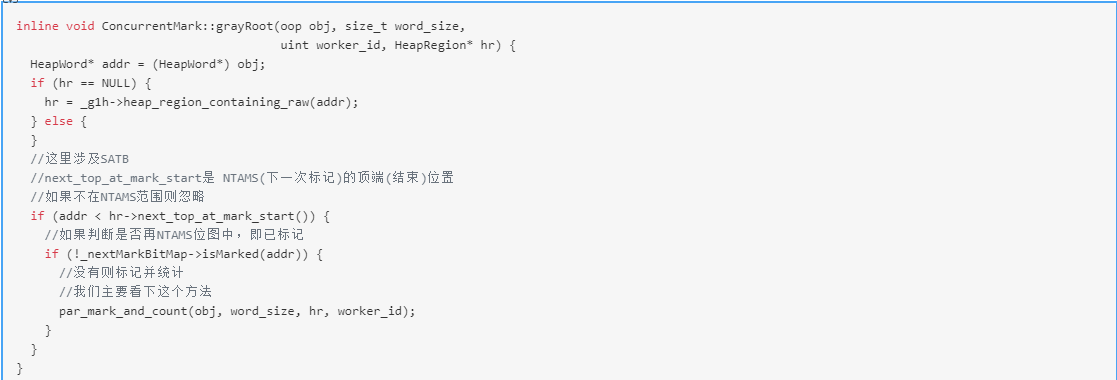
而deal_with_reference()方法是这样的:
inline void CMTask::deal_with_reference(oop obj) {
++_refs_reached;
HeapWord* objAddr = (HeapWord*) obj;
if (_g1h->is_in_g1_reserved(objAddr)) {
//判断是否被NTAMS标记
if (!_nextMarkBitMap->isMarked(objAddr)) {
HeapRegion* hr = _g1h->heap_region_containing_raw(obj);
//这个判断是否大于NTAMS的top,即结束位置
//如果不大于则继续
if (!hr->obj_allocated_since_next_marking(obj)) {
//再NTAMS中标记并计数
//这个方法之前也讲过了,主要是把对象染灰即加入在NTAMS位图中进行标记
if (_cm->par_mark_and_count(obj, hr, _marked_bytes_array, _card_bm)) {
HeapWord* global_finger = _cm->finger();
//finger可以理解为一个标记,记录着遍历region的位置,有一个全局finger和每个region的局部finger
//每个CMTask都负责遍历一个region,其中有一个局部finger
//当小于本地finger时将对象入列本地任务队列
//若本地任务队列满了会将起加入所有任务的全局栈
//本地finger默认从region的开始位置移动,所以一般情况下不会进入
if (_finger != NULL && objAddr < _finger) {
push(obj);
} else if (_curr_region != NULL && objAddr < _region_limit) {
// do nothing
} else if (objAddr < global_finger) {
//小于全局finger时也入列
//这里可能会进入,在处理全局队列的时候也会再处理一次,造成重复处理,但是不影响结果
push(obj);
} else {
// do nothing
}
}
}
}
}
}
至此所有的region(包括survior,老年代,还有大对象region)都已经遍历过一次,并且已经再NATMS位图中进行标记,即染色成灰色。
2.3 最终标记(Remark,STW)
接下来我们下第四步,最终标记(Remark),这个阶段是会STW的,主要逻辑在CMCheckpointRootsFinalClosure这个任务类中和youngGC的任务类执行模式相似,笔者在youngGC的文章中讲过这部分,大家可以看下,我们直接来看CMCheckpointRootsFinalClosure的任务执行方法:
//CMCheckpointRootsFinalClosure任务类处理remark
void do_void(){
//参数是是否清理所有软引用
_cm->checkpointRootsFinal(false); // !clear_all_soft_refs
}
void ConcurrentMark::checkpointRootsFinal(bool clear_all_soft_refs) {
......
//这个方法会调用remark任务
checkpointRootsFinalWork();
double mark_work_end = os::elapsedTime();
//处理虚引用
weakRefsWork(clear_all_soft_refs);
//判断标记栈是否溢出
if (has_overflown()) {
//溢出则设置重启标志,之后会重新进行一次并发标记和remark
_restart_for_overflow = true;
......
// 溢出则重置标记状态
reset_marking_state();
} else {
// 聚合每个任务数据,进行统计
//统计每个region中的_next_marked_bytes
aggregate_count_data();
SATBMarkQueueSet& satb_mq_set = JavaThread::satb_mark_queue_set();
satb_mq_set.set_active_all_threads(false, /* new active value */
true /* expected_active */);
......
// 完成标记重置标记状态
set_non_marking_state();
}
//如果有必要,则对全局栈进行扩容
if (_markStack.should_expand()) {
_markStack.expand();
}
......
}
//remark方法
void ConcurrentMark::checkpointRootsFinalWork() {
ResourceMark rm;
HandleMark hm;
G1CollectedHeap* g1h = G1CollectedHeap::heap();
g1h->ensure_parsability(false);
//并行模式
if (G1CollectedHeap::use_parallel_gc_threads()) {
G1CollectedHeap::StrongRootsScope srs(g1h);
uint active_workers = g1h->workers()->active_workers();
if (active_workers == 0) {
active_workers = (uint) ParallelGCThreads;
g1h->workers()->set_active_workers(active_workers);
}
set_concurrency_and_phase(active_workers, false /* concurrent */);
//主要看这个类,remark任务
CMRemarkTask remarkTask(this, active_workers, false /* is_serial */);
g1h->set_par_threads(active_workers);
g1h->workers()->run_task(&remarkTask);
g1h->set_par_threads(0);
} else {
//单线程
G1CollectedHeap::StrongRootsScope srs(g1h);
uint active_workers = 1;
set_concurrency_and_phase(active_workers, false /* concurrent */);
/主要看这个类,remark任务
CMRemarkTask remarkTask(this, active_workers, true /* is_serial*/);
remarkTask.work(0);
}
......
}
关键还是再CMRemarkTask任务类,我们来看看它的work方法:
//CMRemarkTask的work方法
void work(uint worker_id) {
if (worker_id < _cm->active_tasks()) {
CMTask* task = _cm->task(worker_id);
task->record_start_time();
do {
//熟悉的do_marking_step方法,第一个参数可以理解为是超时时间
//刚刚我们已经分析过这个方法,笔者这里就不过多论述
//和并发标记阶段不一样的是,最终标记阶段这个方法会处理调所有的satb缓冲区
task->do_marking_step(1000000000.0 /* something very large */,
true /* do_termination */,
_is_serial);
} while (task->has_aborted() && !_cm->has_overflown());
task->record_end_time();
}
}
2.4 清除垃圾(Cleanup,STW)
继续回归主线,当进行完最终标记且全局标记栈没有溢出,则会进入最后的阶段Cleanup阶段,我们直接看代码:
//CMCleanUp类的处理方法,这个阶段也是STW的和Remark阶段类似,我们直接看任务类
void do_void(){
_cm->cleanup();
}
void ConcurrentMark::cleanup() {
G1CollectedHeap* g1h = G1CollectedHeap::heap();
if (has_aborted()) {
g1h->set_marking_complete(); // So bitmap clearing isn't confused
return;
}
HRSPhaseSetter x(HRSPhaseCleanup);
g1h->verify_region_sets_optional();
......
G1CollectorPolicy* g1p = G1CollectedHeap::heap()->g1_policy();
g1p->record_concurrent_mark_cleanup_start();
double start = os::elapsedTime();
HeapRegionRemSet::reset_for_cleanup_tasks();
uint n_workers;
// 传入的是全局region位图和card位图
// gc结束后统计数据的任务,统计所有region和card的存活信息
G1ParFinalCountTask g1_par_count_task(g1h, &_region_bm, &_card_bm);
// 是否并行
if (G1CollectedHeap::use_parallel_gc_threads()) {
g1h->set_par_threads();
n_workers = g1h->n_par_threads();
g1h->workers()->run_task(&g1_par_count_task);
g1h->set_par_threads(0);
} else {
n_workers = 1;
g1_par_count_task.work(0);
}
......
//设置标记完成flag
size_t start_used_bytes = g1h->used();
g1h->set_marking_complete();
double count_end = os::elapsedTime();
double this_final_counting_time = (count_end - start);
_total_counting_time += this_final_counting_time;
//打印一些region的存活情况
if (G1PrintRegionLivenessInfo) {
G1PrintRegionLivenessInfoClosure cl(gclog_or_tty, "Post-Marking");
_g1h->heap_region_iterate(&cl);
}
// 交换 NTAMS和PTAMS的bitMaps
swapMarkBitMaps();
g1h->reset_gc_time_stamp();
// 第二个参数是ConcurrentMark的cleanup_list
// 我们来看看这个任务类
G1ParNoteEndTask g1_par_note_end_task(g1h, &_cleanup_list);
if (G1CollectedHeap::use_parallel_gc_threads()) {
g1h->set_par_threads((int)n_workers);
g1h->workers()->run_task(&g1_par_note_end_task);
g1h->set_par_threads(0);
} else {
g1_par_note_end_task.work(0);
}
g1h->check_gc_time_stamps();
//判断cleanup_list是否为空
if (!cleanup_list_is_empty()) {
g1h->set_free_regions_coming();
}
......
//这个方法会把一些老年代region加入到回收集合选择器中
//方便下次mixed gc加入到回收集合中
//再下次的Mixed gc的初次标记中将存活对象copy到其他老年代中,最后进行回收
g1h->g1_policy()->record_concurrent_mark_cleanup_end((int)n_workers);
double end = os::elapsedTime();
_cleanup_times.add((end - start) * 1000.0);
......
}
这个方法的重点再G1ParNoteEndTask任务类和record_concurrent_mark_cleanup_end()记录cleanup结束的方法,我们分别来看下:
//G1ParNoteEndTask的work方法
void work(uint worker_id) {
double start = os::elapsedTime();
//创建 临时的freeRegionList和oldRegionSet,humongousRegionSet
FreeRegionList local_cleanup_list("Local Cleanup List");
OldRegionSet old_proxy_set("Local Cleanup Old Proxy Set");
HumongousRegionSet humongous_proxy_set("Local Cleanup Humongous Proxy Set");
HRRSCleanupTask hrrs_cleanup_task;
//记录并发标记结束的闭包,包含清理region的逻辑并将region加入刚刚创建的三个代理清理集合中
//我们先看看这个任务类
G1NoteEndOfConcMarkClosure g1_note_end(_g1h, worker_id, &local_cleanup_list,
&old_proxy_set,
&humongous_proxy_set,
&hrrs_cleanup_task);
//并发或者单线程对所有region用闭包处理
if (G1CollectedHeap::use_parallel_gc_threads()) {
_g1h->heap_region_par_iterate_chunked(&g1_note_end, worker_id,
_g1h->workers()->active_workers(),
HeapRegion::NoteEndClaimValue);
} else {
_g1h->heap_region_iterate(&g1_note_end);
}
// 在这里更新old和humongous集合
_g1h->update_sets_after_freeing_regions(g1_note_end.freed_bytes(),
NULL /* free_list */,
&old_proxy_set,
&humongous_proxy_set,
true /* par */);
{
MutexLockerEx x(ParGCRareEvent_lock, Mutex::_no_safepoint_check_flag);
// 获取之前计算的最大存活Byte数和释放的byte数
_max_live_bytes += g1_note_end.max_live_bytes();
_freed_bytes += g1_note_end.freed_bytes();
......
//将刚刚释放的region加入到G1ParNoteEndTask的cleanup_list中即ConcurrentMark
//传入的cleanup_list,这里会等到cleanup结束
_cleanup_list->add_as_tail(&local_cleanup_list);
//完成Rset清除任务
HeapRegionRemSet::finish_cleanup_task(&hrrs_cleanup_task);
}
}
//G1NoteEndOfConcMarkClosure的遍历方法,遍历所有region
bool doHeapRegion(HeapRegion *hr) {
//如果是大对象region的中间region则直接跳过
if (hr->continuesHumongous()) {
return false;
}
_g1->reset_gc_time_stamps(hr);
double start = os::elapsedTime();
_regions_claimed++;
//这个方法会交换 每个region的
// _prev_top_at_mark_start和_next_top_at_mark_start
//_prev_marked_bytes和_next_marked_bytes
//并将_next_marked_bytes置空
//至此 PATMS和NATMS的所有标记为都替换完毕
hr->note_end_of_marking();
//累加最大存活bytes
_max_live_bytes += hr->max_live_bytes();
//如果是没有存活对象则释放region
//第二个参数是释放的空间数
//我们看下这个释放region的方法
_g1->free_region_if_empty(hr,
&_freed_bytes,
_local_cleanup_list,
_old_proxy_set,
_humongous_proxy_set,
_hrrs_cleanup_task,
true /* par */);
double region_time = (os::elapsedTime() - start);
_claimed_region_time += region_time;
if (region_time > _max_region_time) {
_max_region_time = region_time;
}
return false;
}
//这个方法会将没存活对象的region的部分属性重置,之后在并发清理阶段释放空间
void G1CollectedHeap::free_region_if_empty(HeapRegion* hr,
size_t* pre_used,
FreeRegionList* free_list,
OldRegionSet* old_proxy_set,
HumongousRegionSet* humongous_proxy_set,
HRRSCleanupTask* hrrs_cleanup_task,
bool par) {
//这个方法不会清除region,先将其加入到临时集合中,即传入的参数
//这里的三个条件分别是
//1.region有使用 2.不是young 3.只有region完全没有存活对象时才会进行清理
if (hr->used() > 0 && hr->max_live_bytes() == 0 && !hr->is_young()) {
//是巨型对象region
if (hr->isHumongous()) {
//释放巨型对象region,这里只是将region的部分属性重置
free_humongous_region(hr, pre_used, free_list, humongous_proxy_set, par);
} else {
//是老年代region
//记录老年代region的信息,并加入到老年代代理集合中
_old_set.remove_with_proxy(hr, old_proxy_set);
//释放region,这里只是将region的部分属性重置
free_region(hr, pre_used, free_list, par);
}
} else {
//young region只清除Rset
hr->rem_set()->do_cleanup_work(hrrs_cleanup_task);
}
}
到这里,如果region中完全没有存活对象的old region和大对象region则会将属性重置,等待并发清理阶段释放空间,年轻代会被清理记忆集合。
之后我们来看看这个方法record_concurrent_mark_cleanup_end():
void
G1CollectorPolicy::record_concurrent_mark_cleanup_end(int no_of_gc_threads) {
//清除回收集合选择器
_collectionSetChooser->clear();
uint region_num = _g1->n_regions();
if (G1CollectedHeap::use_parallel_gc_threads()) {
const uint OverpartitionFactor = 4;
uint WorkUnit;
if (no_of_gc_threads > 0) {
const uint MinWorkUnit = MAX2(region_num / no_of_gc_threads, 1U);
WorkUnit = MAX2(region_num / (no_of_gc_threads * OverpartitionFactor),
MinWorkUnit);
} else {
assert(no_of_gc_threads > 0,
"The active gc workers should be greater than 0");
// In a product build do something reasonable to avoid a crash.
const uint MinWorkUnit = MAX2(region_num / (uint) ParallelGCThreads, 1U);
WorkUnit =
MAX2(region_num / (uint) (ParallelGCThreads * OverpartitionFactor),
MinWorkUnit);
}
//回收集合选择器为添加region做准备
_collectionSetChooser->prepare_for_par_region_addition(_g1->n_regions(),
WorkUnit);
//迭代并选择合适的region添加到回收集合选择器中的任务类
//回收集合选择器是和mixedGC相关的
ParKnownGarbageTask parKnownGarbageTask(_collectionSetChooser,
(int) WorkUnit);
_g1->workers()->run_task(&parKnownGarbageTask);
} else {
KnownGarbageClosure knownGarbagecl(_collectionSetChooser);
_g1->heap_region_iterate(&knownGarbagecl);
}
//回收集合选择器中的Region排序
_collectionSetChooser->sort_regions();
}
//ParKnownGarbageTask 任务类的work方法
void work(uint worker_id) {
//创建遍历的闭包,我们直接看这个闭包的遍历方法
ParKnownGarbageHRClosure parKnownGarbageCl(_hrSorted, _chunk_size);
//遍历region
_g1->heap_region_par_iterate_chunked(&parKnownGarbageCl, worker_id,
_g1->workers()->active_workers(),
HeapRegion::InitialClaimValue);
}
//ParKnownGarbageHRClosure 遍历方法
bool doHeapRegion(HeapRegion* r) {
//判断region是否被标记,这个方法实际看
//_prev_top_at_mark_start(其实是_next_top_at_mark_start,已经被交换了)是不是初始值,如果不是即标记过
if (r->is_marked()) {
//这两个条件分别是
//1.不是大对象regin且存活对象小于阈值
//2.且不是我们gc前正在使用的region
if (_cset_updater.should_add(r) && !_g1h->is_old_gc_alloc_region(r)) {
_cset_updater.add_region(r);
}
}
return false;
}
这里我们可以看到在这个阶段已经再向回收集合选择器中添加old region了,如果触发了mixed gc则在下次mixed gc中会一起把具有回收价值(即存活对象数量小)的old region随年轻代一起处理并回收。
2.5 并发清除(Concurrent Cleanup)
最后就是并发清理的阶段,之前没有存活对象的region只是将其部分属性进行了重置,到了并发清理阶段才会进行清理:
void ConcurrentMark::completeCleanup() {
if (has_aborted()) return;
G1CollectedHeap* g1h = G1CollectedHeap::heap();
_cleanup_list.verify_optional();
FreeRegionList tmp_free_list("Tmp Free List");
......
//判断cleanup_list是否为空
while (!_cleanup_list.is_empty()) {
//从头获取一个region
HeapRegion* hr = _cleanup_list.remove_head();
//清除Rset和region
hr->par_clear();
//加入到临时释放region集合中
tmp_free_list.add_as_tail(hr);
if ((tmp_free_list.length() % G1SecondaryFreeListAppendLength == 0) ||
_cleanup_list.is_empty()) {
{
MutexLockerEx x(SecondaryFreeList_lock, Mutex::_no_safepoint_check_flag);
//将临时free_list加入到second_free_list中
g1h->secondary_free_list_add_as_tail(&tmp_free_list);
SecondaryFreeList_lock->notify_all();
}
if (G1StressConcRegionFreeing) {
for (uintx i = 0; i < G1StressConcRegionFreeingDelayMillis; ++i) {
os::sleep(Thread::current(), (jlong) 1, false);
}
}
}
}
}
关于satb和PTAMS,NTAMS
在老年代并发GC中PTAMS和NTAMS是关于satb的概念,我们来画个图梳理下这部分内容:
初始标记(initial mark)结束后:
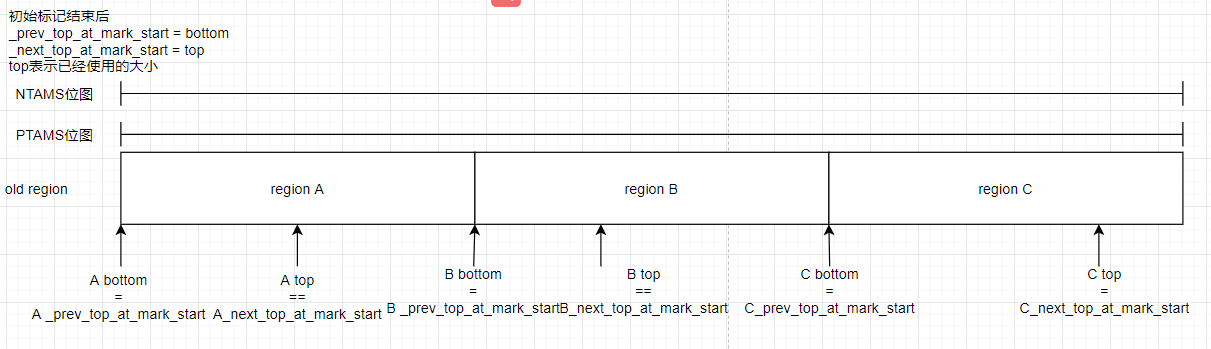
注:_next_top_at_mark_start = top是在初始标记的checkpointRootsInitialPre()方法中设置的,有兴趣的读者可以看下
并发标记(Concurrent Marking)到最终标记阶段(Remark):
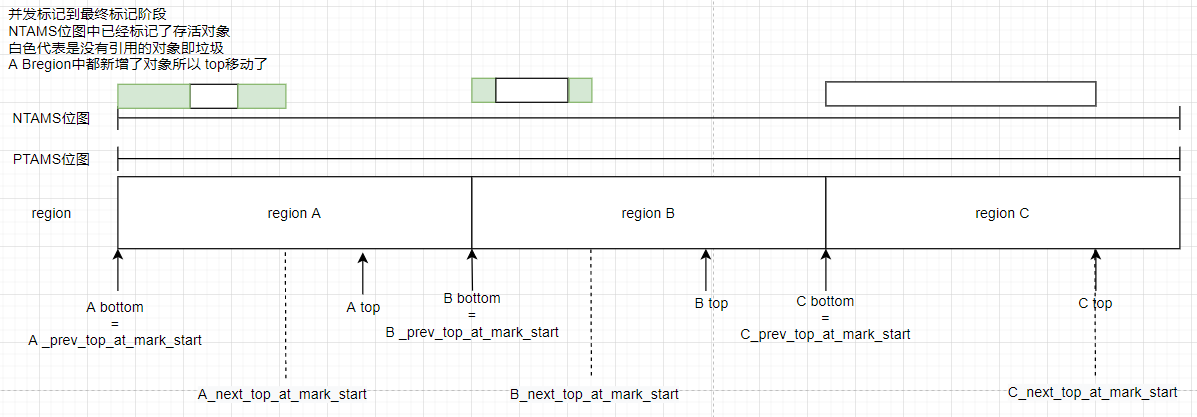
从图中我们可以看出NTAMS和PTAMS位图都是全局维度的,regionC中已经全是垃圾了
清除垃圾(Cleanup):
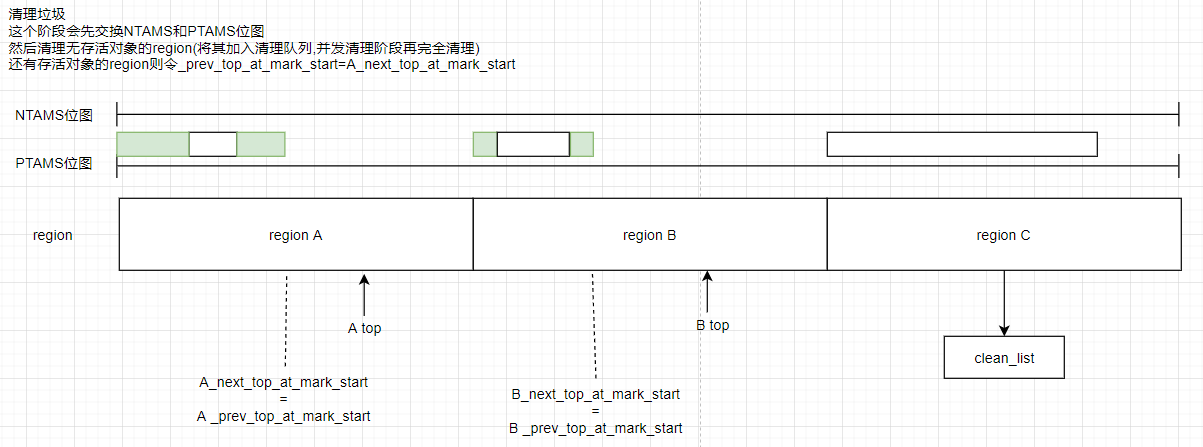
至此一个老年代并发Gc循环结束了,下一次初次标记来临时,_next_top_at_mark_start又会被设置到top的位置,重复上述步骤。
到这里整个老年代并发gc的所有流程结束了,我们继续看关于mixed GC的部分。
3.Mixed GC
笔者前面说过,Mixed GC和老年代并发GC是分不开的,从之前的源码中我们也看到jvm会在cleanup阶段将old region中的一些存活对象小,回收价值高得放入回收集合选择器中,而这个选择器则会在下次Mixed gc(本质上是一次youngGC)开始前将这些region添加到回收集合中参与处理和回收:
//我们还是来看这个方法,这次笔者只将关于回收集合选择器得部分贴出来
void G1CollectorPolicy::finalize_cset(double target_pause_time_ms, EvacuationInfo& evacuation_info) {
......
//前面讲过这个标记即如果是mixed gc
if (!gcs_are_young()) {
//获取回收集合选择器
CollectionSetChooser* cset_chooser = _collectionSetChooser;
......
HeapRegion* hr = cset_chooser->peek();
while (hr != NULL) {
//经过一系列判断
......
cset_chooser->remove_and_move_to_next(hr);
_g1->old_set_remove(hr);
//加入到回收集合中
add_old_region_to_cset(hr);
hr = cset_chooser->peek();
}
......
}
当加入回收集合中时,之后会复用youngGC得代码,将这部分old region中存活得对象copy到其他old region中(关于这部分可以看笔者之前讲述youngGC的博客,这里就不在叙述),处理完成后再进行回收。
三. 后记
不知不觉,这已经是关于G1的第三篇文章了,下一篇应该是关于G1的最后一篇FullGC相关的文章,这个坑就填上了,当然以后可能会更新一些g1的其他部分文章,笔者如果发现比较有意思的功能或者方向也会继续研究。对于笔者来说学习源码是一种兴趣,当然笔者水平有限,如果有写的有出入的地方,欢迎大家指出相互学习。