内存管理学习笔记原创
物理内存分配设计有两个重要的评价维度。一方面,物理内存分配器要追求更高的内存资源利用率,即尽可能减少资源浪费。另一方面,物理内存分配器要追求更好的性能,主要是尽可能降低分配延迟和节约CPU资源。
内存碎片
内存碎片指的是无法被利用的内存,进一步又可以分为外部碎片和内部碎片。
外部碎片

图1 外部碎片
如图1所示,假设系统中共有25MB内存,系统经过长期的运行后,使用了19MB内存(带颜色的部分),假如此时想申请3MB内存,总的空闲内存是满足要求的,但每一块单独的空闲内存都不满足要求。此时这些无法被使用的内存称为外部碎片。
内部碎片
为了解决外部碎片问题,一种比较简的方式就是将物理内存以固定大小划分成若干块,每次用一个块或者多个块来满足一次内存请求。
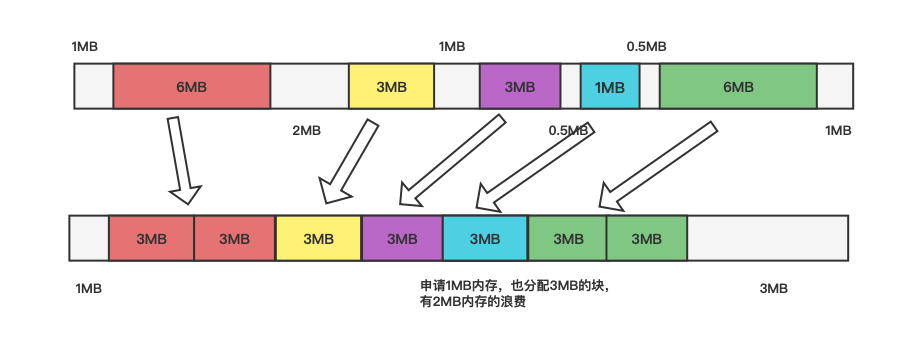
图2 内部碎片
如图2所示,还是这25MB内存,这次以3MB大小固定块来分配内存,申请6MB内存就分配两个固定块,申请3MB内存分配一个固定块,申请1MB内存,也分配一个固定块。可以看到此时外部碎片的问题是解决了,但是又引入了新的问题即只申请1MB内存,却分配了3MB内存,多出的2MB内存即为内部碎片。
下面会介绍linux系统中的页分配器和块分配器,页分配器用来解决外部碎片问题,而块分配器用来解决内部碎片问题,通过这两个分配器,可以有效减少内存碎片的产生,从而提高内存资源的利用率。
物理内存组织
在介绍页分配器和块分配器之前,先来了解下现代计算的物理内存是如何组织的,因为有些概念在后面会用到。
SMP架构
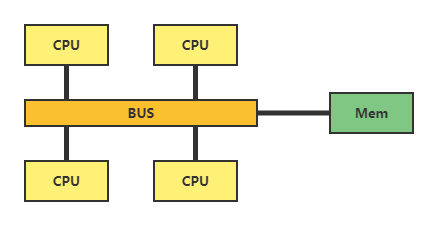
图3 SMP架构
SMP架构就是对称多处理器,所有的CPU必须通过相同的内存总线访问相同的内存资源。所以所有CPU访问内存等资源的速度是一样的,即对称。这种架构的缺点是,CPU数量增加,内存访问冲突将迅速增加,最终会造成CPU资源的浪费,使 CPU性能的有效性大大降低。
NUMA架构
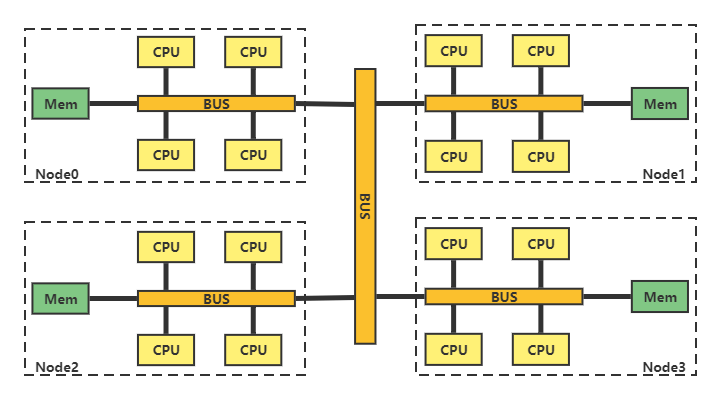
图4 NUMA架构
NUMA架构将CPU划分到多个Node中,每个node有自己独立的内存空间。各个node之间通过高速互联通讯。CPU访问不同类型节点内存的速度是不相同的,访问本地节点的速度最快,访问远端节点的速度最慢,即访问速度与节点的距离有关,距离越远访问速度越慢,即非一致。这种架构的缺点是,本node的内存不足时,需要垮节点访问内存,节点间的访问速度慢。
三级结构
内存管理子系统使用节点(node)、区域(zone)、和页(page)三级结构描述物理内存。
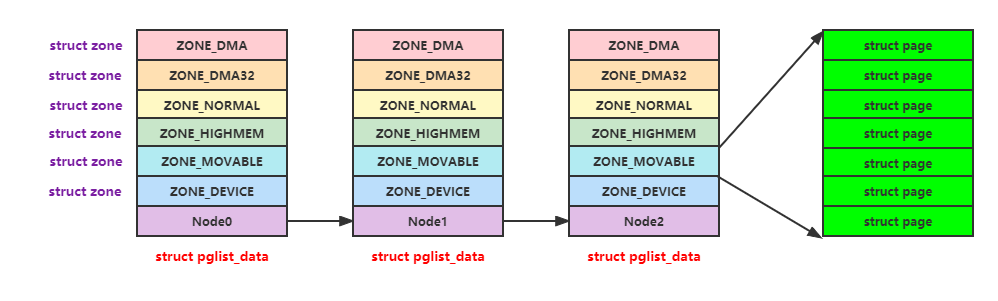
图5 物理内存三级结构
如图5所示,在linux中使用三级结构来描述物理内存。
- 节点(node):每个节点用一个
struct pglist_data结构体来表示,每个节点内的内存会划分成不同的区域 - 区域(zone):每个区域用一个
struct zone结构体来表示,每个区域又会划分成不同的页 - 页(page):每个页用一个
struct page结构体来表示,页是伙伴算法分配的最小单位(比如:4K,16K,64K)。
页分配器(buddy)
伙伴算法
伙伴算法的基本思想是将物理内存划分成连续的块,以块作为基本单位进行分配。不同的块大小可以不同,但每个块都由一个或多个连续的物理页组成,物理页的数量必须是2的n次幂(0 <= n < 预设的最大值)。
内存分配过程
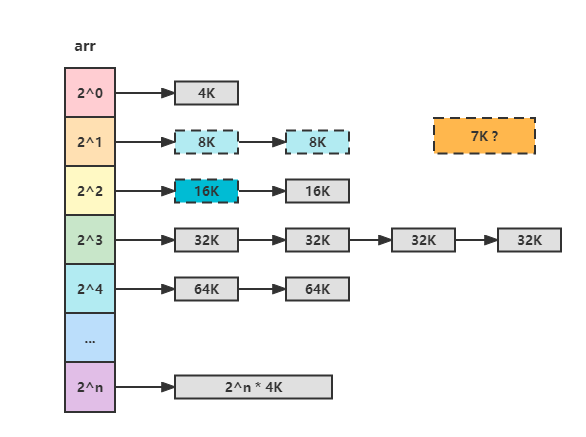
图6 伙伴系统的空闲链表数组
如图6所示伙伴算法一般使用空闲链表数组来实现,假如我们要申请一块7K大小的内存。
- 首先7K / 4K = 1,也就arr[1]这一个空闲链表上申请空闲块,结果发现链表为空。
- 然后发现下一级空闲链表arr[2]不为空,从arr[2]的链表头取出一个16K的空闲块,并分裂成2个8K的空闲块。
- 最后将分裂的2个8K空闲块,一个返回给申请者,另一个放到arr[1]的空闲链表中。
申请完毕,就是这么简单。
伙伴算法特点
- 查找空闲链表的过程十分简单,比如页大小来4K,如果申请7K内存的话,直接7K / 4K = 1计算一下就可以找到空闲链表位置。
- 确定一个块的伙伴块十分简单,比如arr[0]空闲链表块A(0 ~ 4K)和块B(4K ~ 8K)互为伙伴块,块A物理地址为0x0,块B物理地址为0x1000,可以看出只有12位不同,同时块大小也是2^12;再比如arr[1]空闲链表块A(16K ~ 24K)和块B(24K ~ 32K)互为伙伴块,块A物理地址为0x4000,块B物理地址0x6000,可以看出只有13位不同,同时块大小也是2^13(很神奇)。
- 由于伙伴算法的这种特点,在块的分裂与合并的计算都很高效,有效的管理了物理内存,很好的缓解了外部碎片的问题。
分区的伙伴算法
前面介绍了Linux使用三级结构来描述物理内存,Linux伙伴算法是基于区域(zone)这一级来实现。
实现方法也很简单,就是在struct zone结构体中定义了一个struct free_area结构体数据,这个数组也就是我们前面提到了空闲链表数组。可以看到MAX_ORDER默认值为11,也就是说最大的块为为2^10 * 4K(4K页大小) = 4M,假如申请内存大小超过4M,会申请成功吗?。
如上为使用qemu模拟的环境,可以看出2^10的大小块有207个,2^9的大小块为3个……
可移动性分组
到前一小节为止,伙伴系统的主要内容已经介绍完了,但是Linux针对内存碎片问题还有很多优化,本小节会介绍下可移动性分组的实现原理。
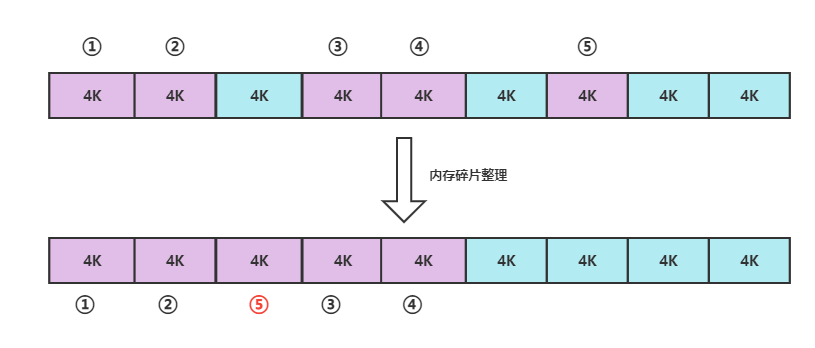
图7 内存碎片整理
如图7所示,假如系统运行一段时间后,被使用的内存为紫色部分,空闲的为淡蓝色部分,此时可使用的连续的物理内存只有8K;如果经过内存碎片整理,把使用的内存都放到一起,那么可使的连续的物理内存就有16K了。伙伴算法只会保证在内存申请的时候尽量避免内存碎片的产生,但是内存碎片不可避免的还是会产生,这时就需要在运行时对内存碎片进行整理,从而获取更大的连续内存。
如图7所示是对编号5的内存块进行了迁移,假如编号5的内存块不能移动,中间的内存碎片就得不到整理,这种情况咱办呢?
针对前面提到的问题,Linux将物理内存进行了划分,分为不可移动页,可移动页,可回收页。
- 不可移动页:位置必须固定,不能移动,直接映射到内核虚拟地址空间的页属于这一类。
- 可移动页:使用页表映射的页属于这一类,可以移动到其他位置,然后修改页表映射。
- 可回收页:不能移动,但可以回收,需要数据的时候,可以重新从数据源获取。后备存储设备支持的页属于这一类。
继续看struct free_area结构体,里面定义了一个数组链表,数组索引为当前块的迁移类型。所以在申请内存的时候,可以通过flag来告诉系统,要申请什么类型的内存,系统会将相同类型的内存放在一起,从而解决上面的提到的问题。这里的思路也是在内存申请时,尽量减少内存碎片的产生。
假如申请内存大小超过4M,会申请成功吗?
如上代码10 ~ 13行,当申请内存大小超过系统最大块时,内存申请会失败的。但如果就想申请大块内存,比如像图像数据这种就需要大块内存,怎么办呢?可以使用保留内存的方式。
块分配器(slab)
伙伴系统最小的分配单位是一个物理页,但是大多数情况下,内核需要分配的内存大小通常是几十个字节或者几百个字节,远远小于一个物理页的大小。如果仅仅使用伙伴系统进行内存分配,会出现严重的内部碎片问题,从而导致资源利用率降低。
块分配器(slab)就是用来解决这个问题的,slab分配器做的事情是把伙伴系统分配的大块内存进一步细分成小块内存进行管理。一方面由于操作系统频繁分配的对象大小相对固定,另一方面为了避免外部碎片问题。其实现也比较简单,一般slab分配器只分配固定大小的内存块,大小通常是2^n个字节(一般来说,3 <= n < 12,4K大小页)。
SLAB发展
20世纪90年代,Jeff Bonwick最先在Solaris 2.4操作系统内核中设计并实现了SLAB分配器。之后,该分配器广泛地被Linux、FreeBSD等操作系统使用并得以发展。21世纪,操作系统开发人员逐渐发现SLAB分配器存在一些问题,比如维护了太多了队列、实现日趋复杂、存储开销也由于复杂的设计而增大等。于是,开发人员在SLAB的分配器的基础上设计了SLUB分配器。
SLUB分配器极大简化了SLAB分配器的设计和数据结构,在降低复杂度的同时依然能够提供与原来相当甚至更好的性能,同时也继承了SLAB分配器的接口。
此外,SLAB分配器家族中还有一种最简单的分配器称为SLOB分配器,它的出现主要为了满足内存资源稀缺的场景(比如嵌入式设备)的需求,它具有最小的存储开销,但在碎片问题的处理方面比不上其他两种分配器。
SLAB、SLUB、SLOB三种分配器往往被统称为SLAB分配器。
基本原理
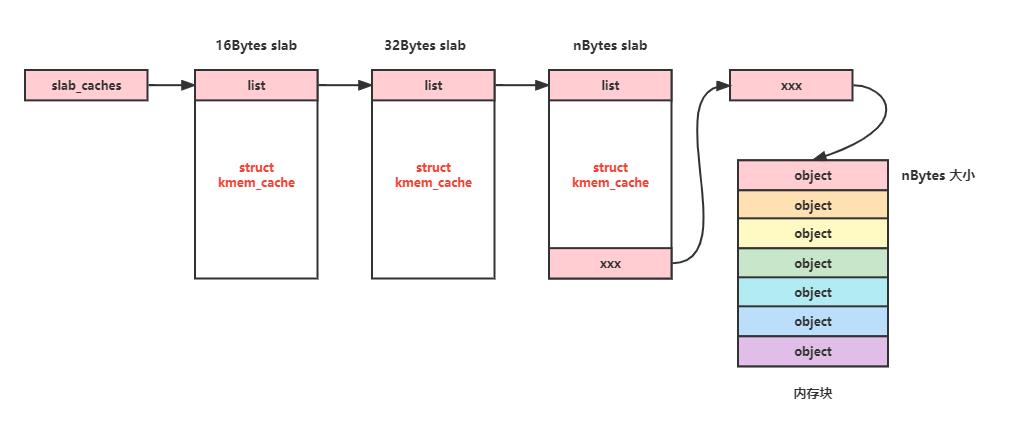
图8 slab空闲链表
slab分配器实现也很简单,如图8所示,Linux通过链表来维护不同大小的slab结构(struct kmem_cache结构体), 每个slab结构中都会记录内存块的信息,并将大的内存块划分内多个小的内存块备用。当有内存申请时,首先会找到合适大小的slab结构,然后从小的内存块中返回一个给申请者就可以了(看就是这么简单)。用链表来维护slab结构,难道申请内存的时候需要遍历一次链表?当然不会!
struct kmem_cache结构体一般有两种初始化方式。
- 系统初始化
在系统初始化时,会初始化一批常用大小的slab结构体,其对应全局变量kmalloc_caches,使用类似kmalloc()这种接口时,会根据申请内存大小直接找到对应的slab结构。
/* mm/slab_common.c */
struct kmem_cache *kmalloc_caches[NR_KMALLOC_TYPES][KMALLOC_SHIFT_HIGH + 1] =
{ /* initialization for https://bugs.llvm.org/show_bug.cgi?id=42570 */ };
EXPORT_SYMBOL(kmalloc_caches);- 自己初始化
除了系统自带的slab结构,当然也可以使用自己创建的slab结构,常用接口如下,相信大家基于都使用过,就不多介绍了
调试slab分配器
Linux对slab分配器还做了很多优化,比如per cpu支持,numa构架的支持,这里面有很多细节,可以研究研究源码。本小节从实际需求出发,比如我们有如下需求:
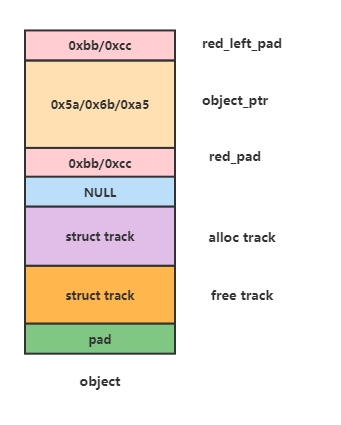
图9 object内存结构
前一小节介绍了,slab分配器会将大块内存划分成多个小块内存,每一个小块内存对应一个object结构(如图9),对于上面的需求,基本思路就是给每个object多分配一些内存,用来存储与该内存块相关的额外信息。下面分析下object内存结构。
- red_left_pad:该区域会填充两个值0xbb或0xcc,分别表示该内存块是否被使用,这个区域就可以用来做一些内存检查。
- object_ptr:该区域是真正给申请都使用的内存区域,如果开启毒化功能的话,该区域会填充0x5a、0x6b、0xa5,从伙伴系统申请大块内存后,会填充成0x5a,划分成小块后会填充0x6b,而该区域最后一个字节填充0xa5,这个区域也可以用来做一些内存检查。
- track:该区域用来记录内存申请或者释放相关的信息,比如申请或释放的堆栈,申请或释放的cpu/pid/时间等信息。
/* mm/slub.c */
/*
* Tracking user of a slab.
*/
#define TRACK_ADDRS_COUNT 16
struct track {
unsigned long addr; /* Called from address */
#ifdef CONFIG_STACKTRACE
unsigned long addrs[TRACK_ADDRS_COUNT]; /* Called from address */
#endif
int cpu; /* Was running on cpu */
int pid; /* Pid context */
unsigned long when; /* When did the operation occur */
};所以当进行内存的申请与释放时,只需要把这些额外的信息记录下来就可以了。
总结
- 内存分配设计的两个维度,提高内存的利用率,减少内存分配时的延时与CPU占用率。
- 页分配器用来解决外部碎片问题,块分配器用来解决内部碎片问题,从而提高内存的利用率。
- 页分配器与块分配器的算法简单、高效。
其它
实验环境
kernel version:v5.12
qemu version:v6.0.0
参考
http://www.wowotech.net/memory_management/426.html
http://www.wowotech.net/memory_management/427.html
https://blog.csdn.net/weixin_42319496/article/details/125940807
https://zhuanlan.zhihu.com/p/149581303
《现代操作系统原理与实现》
《Linux内核深度解析》
作者简介:尹忠凯,Linux内核爱好者,阅码场用户。现就职于北京地平线信息技术有限公司,任系统软件工程师。