从 Linux 内核角度探秘 JDK MappedByteBuffer原创
本文涉及到的内核源码版本为: 5.4 ,JVM 源码为:OpenJDK17,RocketMQ 源码版本为:5.1.1
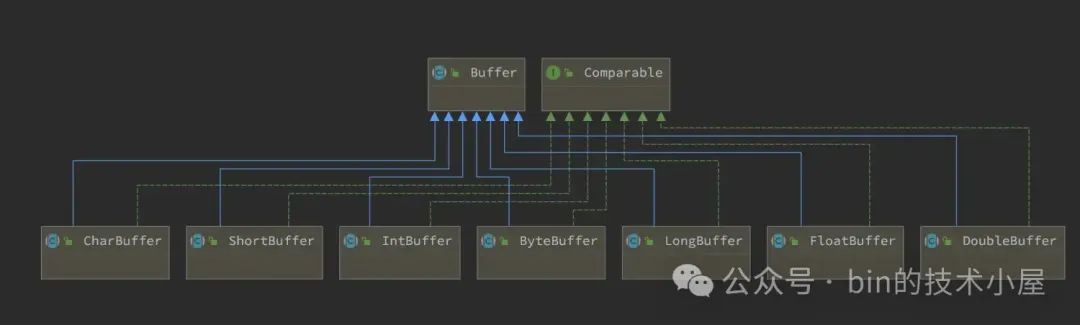
在之前的文章《一步一图带你深入剖析 JDK NIO ByteBuffer 在不同字节序下的设计与实现》 中,笔者为大家详细剖析了 JDK Buffer 的整个设计体系,从总体上来讲,JDK NIO 为每一种 Java 基本类型定义了对应的 Buffer 类(boolean 类型除外)。
而 Buffer 本质上其实是 JDK 对 OS 中某一段内存在 Java 语言层面上的封装,当然了,这里的内存指的是虚拟内存,我们需要从之前文章中的内核空间视角切换到用户空间上来,所以本文提到的内存如无特殊说明均是指虚拟内存。
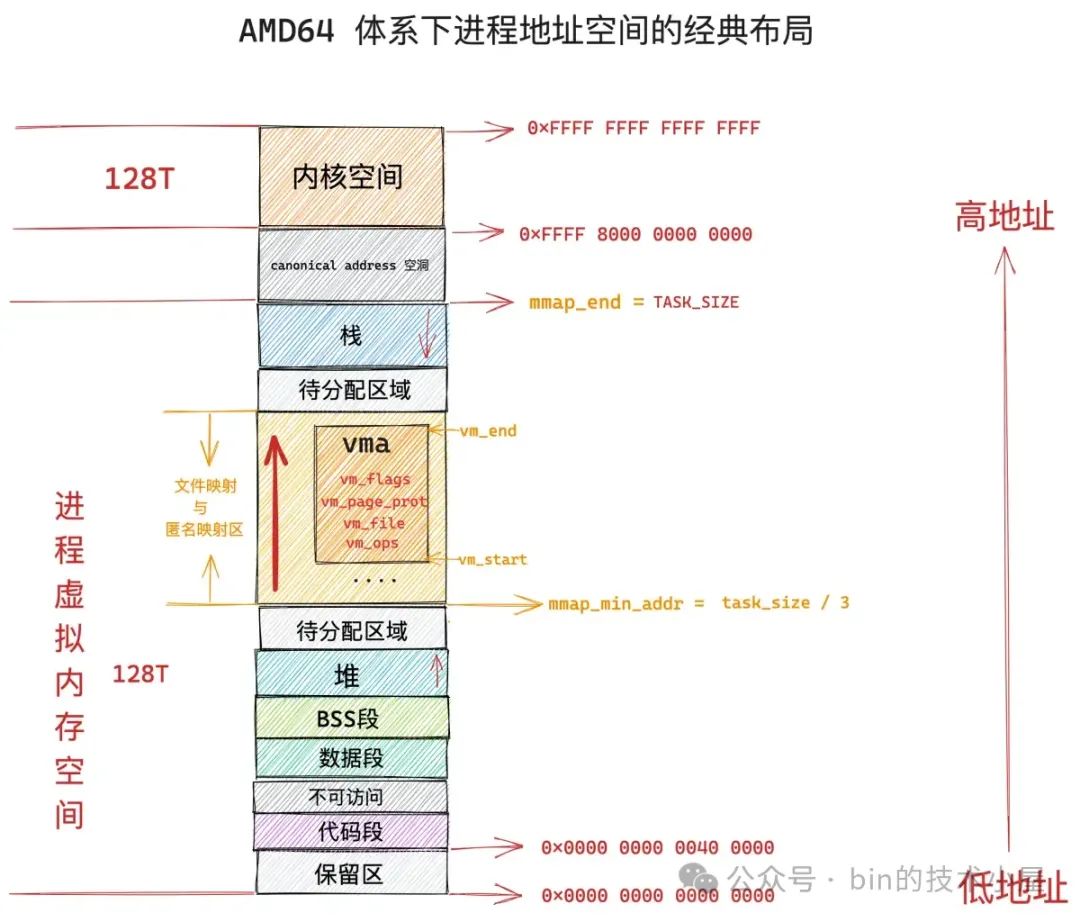
JVM 在操作系统的视角来看其实就是一个普通的进程,而进程的虚拟内存空间我们通过前面 Linux 内存管理系列文章 的洗礼,可以说是非常熟悉了。内核会根据进程在运行期间所需数据的功能特性不同,而为每一类数据专门开辟出一段虚拟内存区域出来。比如:
-
用于存放进程程序二进制文件中的机器指令以及只读常量的代码段
-
用于存放程序二进制文件中定义的全局变量和静态变量的数据段和 BSS 段。
-
用于在程序运行过程中动态申请内存的堆,这里指的是 OS 堆。
-
用于存放动态链接库以及内存映射区域的文件映射与匿名映射区。
-
用于存放进程在函数调用过程中的局部变量和函数参数的栈。
而 JDK Buffer 也会根据其背后所依赖的虚拟内存在进程虚拟内存空间中具体所属的虚拟内存区域而演变出 HeapByteBuffer , MappedByteBuffer , DirectByteBuffer 。这三种不同类型 ByteBuffer 的本质区别就是其背后依赖的虚拟内存在 JVM 进程虚拟内存空间中的布局位置不同。
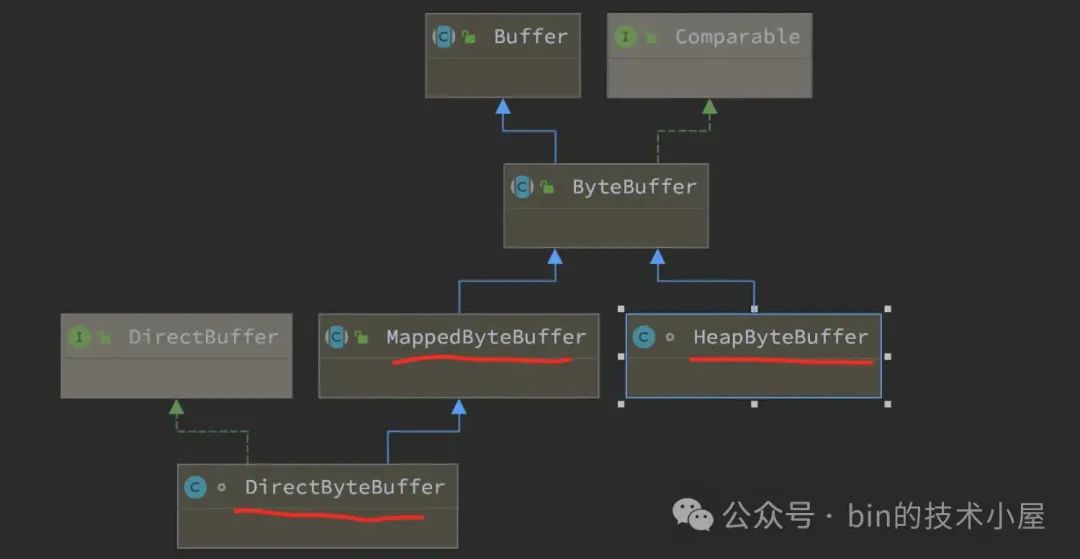
如下图所示,HeapByteBuffer 底层依赖的字节数组背后的内存位于 JVM 堆中:
public abstract class ByteBuffer extends Buffer implements Comparable<ByteBuffer> {
// 所属内存位于 JVM 堆中
final byte[] hb;
}
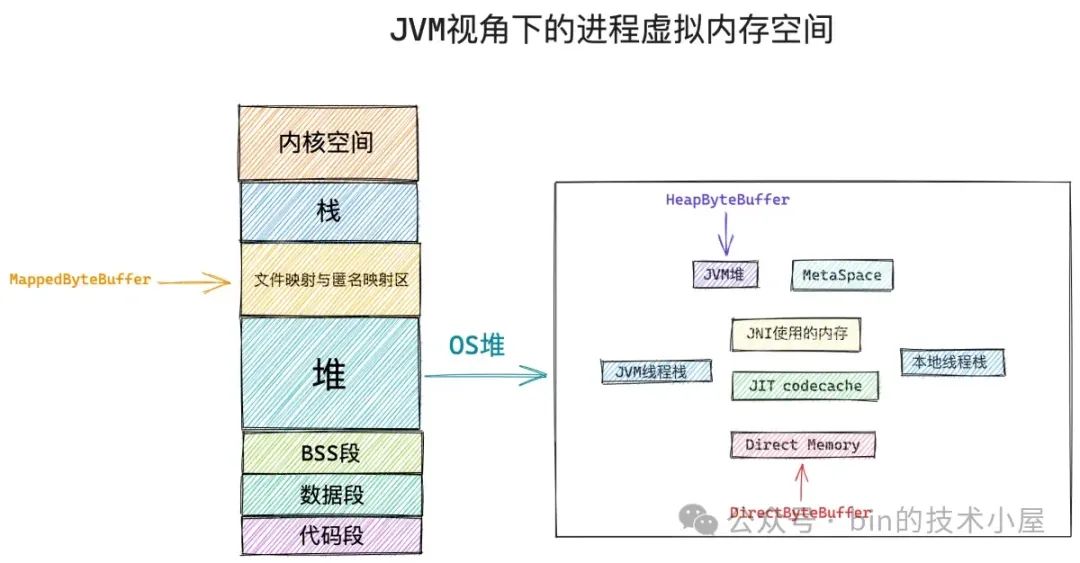
位于 JVM 堆之外的内存其实都可以归属到 DirectByteBuffer 的范畴中。比如,位于 OS 堆之内,JVM 堆之外的 MetaSpace,即时编译(JIT) 之后的 codecache,JVM 线程栈,Native 线程栈,JNI 相关的内存,等等。
JVM 在 OS 堆中划分出的 Direct Memory (上图红色部分)特指受到参数 -XX:MaxDirectMemorySize 限制的直接内存区域,比如通过 ByteBuffer#allocateDirect 申请到的 Direct Memory 容量就会受到该参数的限制。
public abstract class ByteBuffer extends Buffer implements Comparable<ByteBuffer> {
public static ByteBuffer allocateDirect(int capacity) {
return new DirectByteBuffer(capacity);
}
}
而通过 Unsafe#allocateMemory 申请到的 Direct Memory 容量则不会受任何 JVM 参数的限制,只会受操作系统本身对进程所使用内存容量的限制。也就是说 Unsafe 类会脱离 JVM 直接向操作系统进行内存申请。
public final class Unsafe {
public long allocateMemory(long bytes) {
return theInternalUnsafe.allocateMemory(bytes);
}
}
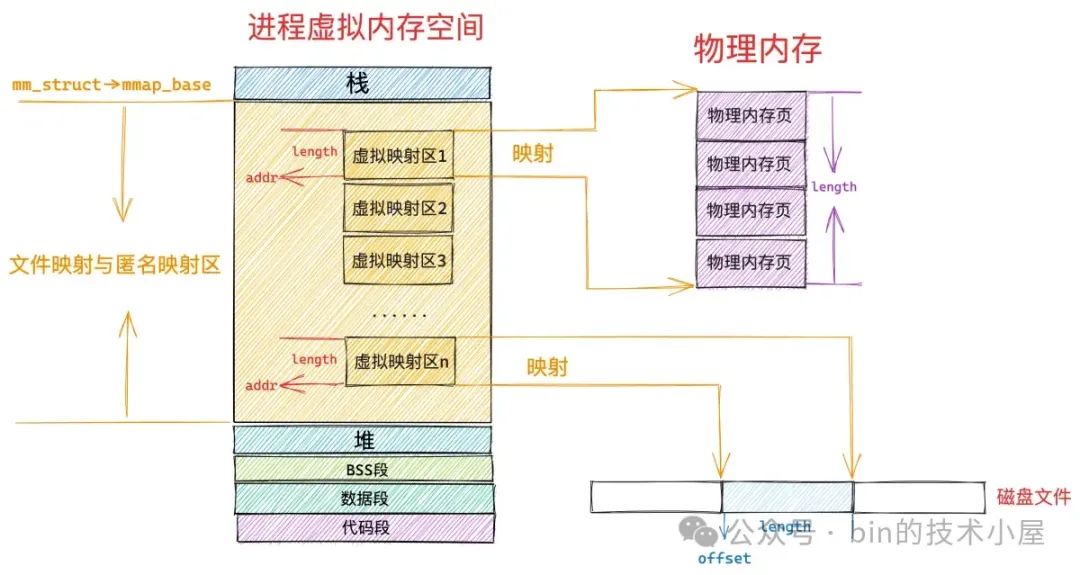
MappedByteBuffer 背后所占用的内存位于 JVM 进程虚拟内存空间中的文件映射与匿名映射区中,系统调用 mmap 映射出来的内存就是在这个区域中划分的。
mmap 有两种映射方式,一种是匿名映射,常用于进程动态的向 OS 申请内存,比如,glibc 库里提供的用于动态申请内存的 malloc 函数,当申请的内存大于 128K 的时候,malloc 就会调用 mmap 采用匿名映射的方式来申请。
另一种就是文件映射,用于将磁盘文件中的某段区域与进程虚拟内存空间中文件映射与匿名映射区里的某段虚拟内存区域进行关联映射。后续我们针对这段映射内存的读写就相当于是对磁盘文件的读写了,整个读写过程没有数据的拷贝,也没有切态的发生(这里特指在完成缺页处理之后)。
JDK 仅仅只是对 mmap 文件映射方式进行了封装,所以 MappedByteBuffer 的本质其实是对文件映射与匿名映射区中某一段虚拟映射区域在 JVM 层面上的描述。这段虚拟映射区的起始内存地址 addr 以及映射长度 length 被封装在 MappedByteBuffer 中的 address , capacity 属性中:
public abstract class Buffer {
// 虚拟映射区域的起始地址
long address;
// 映射长度
private int capacity;
}
好了,现在我们已经从总体上清楚了 JDK Buffer 体系在 JVM 进程虚拟内存空间中的布局情况,下面我们正式开始本文的主题,笔者会从 OS 内核,JVM ,中间件应用,这三个视角带大家深入拆解一下 MappedByteBuffer。

1. OS 内核视角下的 MappedByteBuffer
我们先从与 MappedByteBuffer 紧密相关的底层系统调用 mmap 开始切入 OS 内核的视角:
#include <sys/mman.h>
void* mmap(void* addr, size_t length, int prot, int flags, int fd, off_t offset);
mmap 的主要任务就是在文件映射与匿名映射区中为本次映射划分出一段虚拟内存区域出来,然后 JVM 将这段划分出来的虚拟内存区域在 Java 语言层面包装成 MappedByteBuffer 供程序员来使用。
那么内核该从文件映射与匿名映射区的哪个位置开始,以及划分多大的虚拟映射区呢 ?这就用到了 mmap 系统调用参数 addr 和 length。length 参数用于指定我们需要映射的虚拟内存区域大小。
如果我们指定了 addr,表示我们希望内核从这个地址开始划分虚拟映射区,但是这个参数只是给内核的一个暗示,内核并非一定得从我们指定的 addr 处划分虚拟内存区域。
内核在文件映射与匿名映射区中划分虚拟内存区域的时候会优先考虑我们指定的 addr,如果这个虚拟地址已经被使用或者是一个无效的地址,那么内核则会自动选取一个合适的虚拟内存地址开始映射。
如果我们需要强制内核从 addr 指定的虚拟内存地址处开始映射的话,就需要在 flags 参数中指定 MAP_FIXED 标志,这样一来无论这段虚拟内存区域 [addr , addr + length] 是否已经存在映射关系,内核都会强行进行映射,如果这块区域已经存在映射关系,那么后续内核会把旧的映射关系覆盖掉。
unsigned long
arch_get_unmapped_area(struct file *filp, unsigned long addr,
unsigned long len, unsigned long pgoff, unsigned long flags)
{
if (flags & MAP_FIXED)
return addr;
}
我们一般会将 addr 设置为 NULL,意思就是完全交由内核来帮我们决定虚拟映射区的起始地址。
通过 mmap 映射出来的这段虚拟内存区域相关访问权限由参数 prot 进行指定:
#define PROT_READ 0x1 /* page can be read */
#define PROT_WRITE 0x2 /* page can be written */
#define PROT_EXEC 0x4 /* page can be executed */
#define PROT_NONE 0x0 /* page can not be accessed */
PROT_READ 表示可读权限,PROT_WRITE 表示可写权限,PROT_EXEC 表示执行权限。PROT_NONE 表示这段虚拟内存区域是不能被访问的,既不可读写,也不可执行。
PROT_NONE 常用于中间件预先向操作系统一次性申请一批内存作为预留内存(reserve_memory),当用户使用的时候,中间件再从这些预留内存中一点一点的分配。
比如,JVM 堆以及 MetaSpace 等 JVM 中的内存区域,JVM 在一开始的时候就会根据 -Xmx,-XX:MaxMetaspaceSize 指定的大小预先向操作系统申请一批内存作为 reserve_memory。这部分 reserve_memory 的权限就是 PROT_NONE ,是不可访问的。用于首先确定 JVM 堆和 MetaSpace 这些内存区域的地址范围(首先划分势力范围)。
// 文件:/hotspot/os/linux/os_linux.cpp
char* os::pd_reserve_memory(size_t bytes, bool exec) {
return anon_mmap(NULL, bytes);
}
static char* anon_mmap(char* requested_addr, size_t bytes) {
const int flags = MAP_PRIVATE | MAP_NORESERVE | MAP_ANONYMOUS;
char* addr = (char*)::mmap(requested_addr, bytes, PROT_NONE, flags, -1, 0);
return addr == MAP_FAILED ? NULL : addr;
}
这样一来,后续我们根据一个虚拟内存地址就可以定位到该内存地址究竟是属于 JVM 中哪一个内存区域,方便后续做近一步的处理。
当 JVM 真正需要内存的时候,就会从这部分 reserve_memory 中划分出一部分(commit_memory)来使用 —— JVM 通过 mmap 重新映射 commit_memory 大小的虚拟内存出来。
JVM 在调用 mmap 重新映射的时候,flags 参数指定了 MAP_FIXED 标志,强制内核从之前的 reserve_memory 中重新映射。参数 prot 重新指定了 PROT_READ | PROT_WRITE 权限。
// 文件:/hotspot/os/linux/os_linux.cpp
bool os::pd_commit_memory(char* addr, size_t size, bool exec) {
return os::Linux::commit_memory_impl(addr, size, exec) == 0;
}
int os::Linux::commit_memory_impl(char* addr, size_t size, bool exec) {
int prot = exec ? PROT_READ|PROT_WRITE|PROT_EXEC : PROT_READ|PROT_WRITE;
uintptr_t res = (uintptr_t) ::mmap(addr, size, prot,
MAP_PRIVATE|MAP_FIXED|MAP_ANONYMOUS, -1, 0);
}
mmap 系统调用的映射方式由 flags 参数决定:
#define MAP_FIXED 0x10 /* Interpret addr exactly */
#define MAP_ANONYMOUS 0x20 /* don't use a file */
#define MAP_SHARED 0x01 /* Share changes */
#define MAP_PRIVATE 0x02 /* Changes are private */
MAP_ANONYMOUS 表示进行的是匿名映射,常用于向 OS 申请内存,比如上面的 JVM 源码,通过 mmap 系统调用申请内存的时候,flags 参数就指定了 MAP_ANONYMOUS 标志。
MAP_SHARED 表示共享映射,通过 mmap 映射出的这片内存区域(MappedByteBuffer)在多进程之间是共享的,一个进程修改了共享映射的内存区域,其他进程是可以看到的,用于多进程之间的通信。
MAP_PRIVATE 表示私有映射,通过 mmap 映射出的这片内存区域(MappedByteBuffer)是进程私有的,其他进程是看不到的。如果是私有文件映射,那么多进程针对同一映射文件的修改将不会回写到磁盘文件上。
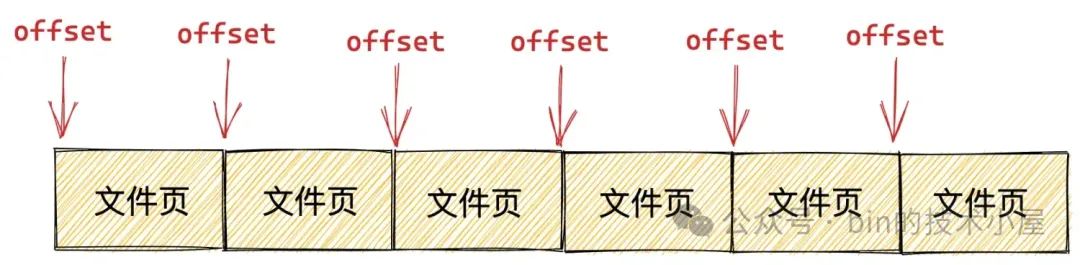
如果我们想要通过 mmap 将文件映射到内存中,就需要指定参数 fd 以及 offset。fd 就是映射文件在 JVM 进程中的 file descriptor ,offset 表示我们要从文件中的哪个位置偏移处开始映射文件内容。
由于 JDK 只对用户开放了文件映射的方式,所以本小节的 OS 视角我们也只是聚焦在文件映射在内核的实现部分。
文件映射有私有文件映射和共享文件映射之分,我们在使用 mmap 系统调用的时候,通过将参数 flags 设置为 MAP_PRIVATE,然后指定参数 fd 为映射文件的 file descriptor 来实现对文件的私有映射。通过将参数 flags 设置为 MAP_SHARED 来实现对文件的共享映射。
无论是私有映射的方式还是共享映射的方式,内核在对文件进行内存映射之前,都需要通过 get_unmapped_area 函数在 JVM 进程虚拟内存空间中的文件映射与匿名映射区里寻找一段还没有被映射过的空闲虚拟内存区域。
在拿到这段空闲的虚拟内存区域之后,通过 mmap_region 函数将文件映射到这块虚拟内存区域中来。
unsigned long do_mmap(struct file *file, unsigned long addr,
unsigned long len, unsigned long prot,
unsigned long flags, vm_flags_t vm_flags,
unsigned long pgoff, unsigned long *populate,
struct list_head *uf)
{
// 首先在进程虚拟内存空间中的文件映射与匿名映射区中寻找一段还没有被映射过的空闲虚拟内存区域
addr = get_unmapped_area(file, addr, len, pgoff, flags);
// 将这段空闲虚拟内存区域与文件进行映射
addr = mmap_region(file, addr, len, vm_flags, pgoff, uf);
}
这段被内核拿来用作文件映射的虚拟内存区域在 Java 层面的表现形式就是 JDK 中的 MappedByteBuffer,在 OS 内核中的表现形式是 vm_area_struct。
struct vm_area_struct {
// MappedByteBuffer 在内核中的起始内存地址
unsigned long vm_start; /* Our start address within vm_mm. */
// MappedByteBuffer 在内核中的结束内存地址
unsigned long vm_end; /* The first byte after our end address
within vm_mm. */
/*
* Access permissions of this VMA
* MappedByteBuffer 相关的操作权限(内核角度)
* 通过 mmap 参数 prot 传递
*/
pgprot_t vm_page_prot;
// 相关映射方式,通过 mmap 参数 flags 传递
unsigned long vm_flags;
// 映射文件
struct file * vm_file; /* File we map to (can be NULL). */
// 需要映射的文件内容在磁盘文件中的偏移
unsigned long vm_pgoff; /* Offset (within vm_file) in PAGE_SIZE
units */
/* Function pointers to deal with this struct. */
// 内核层面针对这片虚拟内存区域 MappedByteBuffer 的相关操作函数
const struct vm_operations_struct *vm_ops;
}
在 mmap_region 函数的开始,内核需要为这段虚拟内存区域分配 vma 结构,类比我们在 Java 语言层面创建一个 MappedByteBuffer 。随后会并根据具体的文件映射方式对 vma 结构相关的属性进行初始化,最后将这个 vma 结构通过 vma_link 插入到进程的虚拟内存空间中。这样一来,我们在 Java 应用层面就拿到了一个完整的 MappedByteBuffer。
unsigned long mmap_region(struct file *file, unsigned long addr,
unsigned long len, vm_flags_t vm_flags, unsigned long pgoff,
struct list_head *uf)
{
// 从 slab 内存池中申请一个新的 vma 结构
vma = vm_area_alloc(mm);
// 根据我们要映射的虚拟内存区域属性初始化 vma 结构中的相关属性
vma->vm_start = addr;
vma->vm_end = addr + len;
vma->vm_flags = vm_flags;
vma->vm_page_prot = vm_get_page_prot(vm_flags);
vma->vm_pgoff = pgoff;
// 针对文件映射的处理
if (file) {
// 将文件与虚拟内存 MappedByteBuffer 映射起来
vma->vm_file = get_file(file);
// 这一步中将虚拟内存区域 vma 的操作函数 vm_ops 映射成文件的操作函数(和具体文件系统有关)
// ext4 文件系统中的操作函数为 ext4_file_vm_ops
// 从这一刻开始,读写内存就和读写文件是一样的了
error = call_mmap(file, vma);
}
// 将 vma 结构插入到当前 JVM 进程的地址空间中
vma_link(mm, vma, prev, rb_link, rb_parent);
}
内存文件映射最关键的部分是下面两行内核代码:
vma->vm_file = get_file(file);
error = call_mmap(file, vma);
内核层面的 vm_area_struct( vma )对应于 Java 层面的 MappedByteBuffer,内核层面的 file 对应于 Java 层面的 FileChannel。
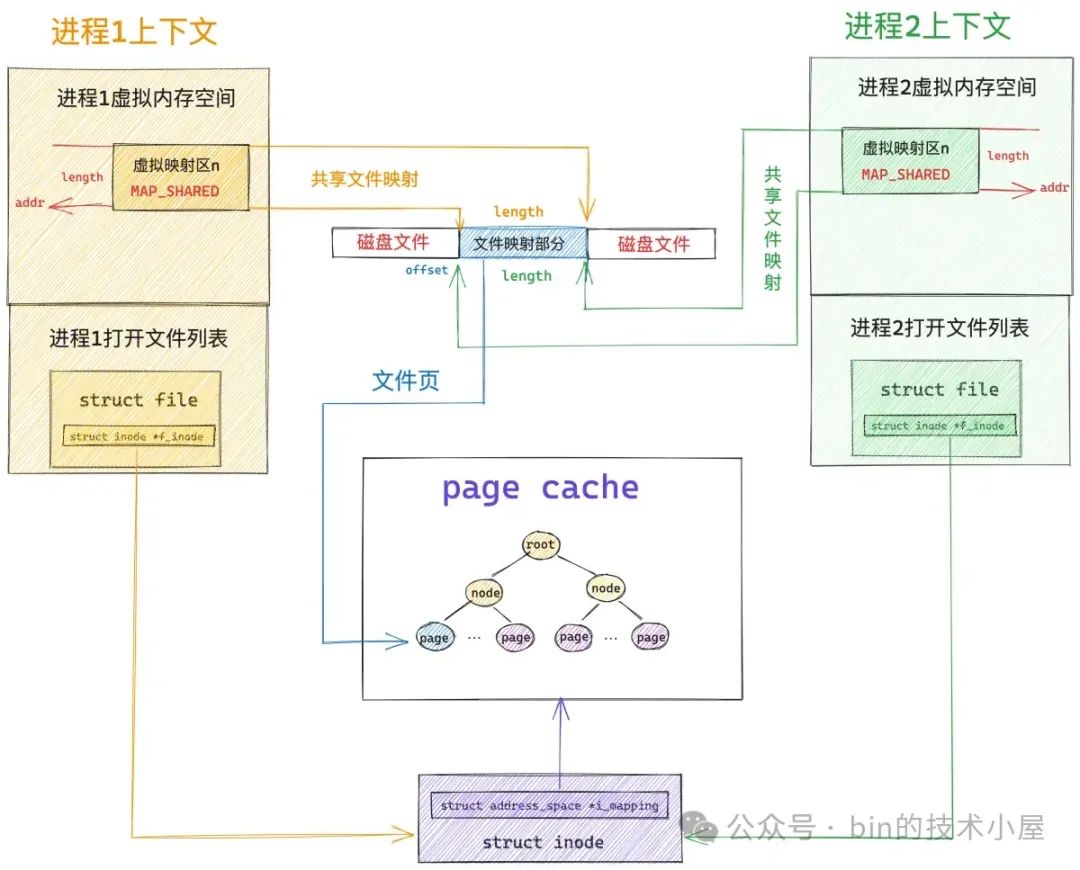
struct file 结构是内核用来描述被进程打开的磁盘文件的,它和进程是强相关的( fd 的作用域也是和进程相关的),即使多个进程打开同一个文件,那么内核会为每一个进程创建一个 struct file 结构。struct file 中指向了一个非常重要的结构 —— struct inode。
struct file {
struct inode *f_inode;
}
每一个磁盘上的文件在内核中都会有一个唯一的 struct inode 结构,inode 结构和进程是没有关系的,一个文件在内核中只对应一个 inode,inode 结构用于描述文件的元信息,比如,文件的权限,文件中包含多少个磁盘块,每个磁盘块位于磁盘中的什么位置等等。
// ext4 文件系统中的 inode 结构
struct ext4_inode {
// 文件权限
__le16 i_mode; /* File mode */
// 文件包含磁盘块的个数
__le32 i_blocks_lo; /* Blocks count */
// 存放文件包含的磁盘块
__le32 i_block[EXT4_N_BLOCKS];/* Pointers to blocks */
};
在文件系统中,Linux 是按照磁盘块为单位对磁盘中的数据进行管理的,磁盘块的大小为 4K。找到了文件中的磁盘块,我们就可以寻址到文件在磁盘上的存储内容了。
内核通过将 vma->vm_file 与映射文件进行关联之后,就可以通过 vm_file->f_inode 找到映射文件的 struct inode 结构,近而找到到映射文件在磁盘中的磁盘块 i_block。这样一来,虚拟内存就与底层文件系统中的磁盘块发生了关联,这也是 mmap 内存文件映射的本质所在。
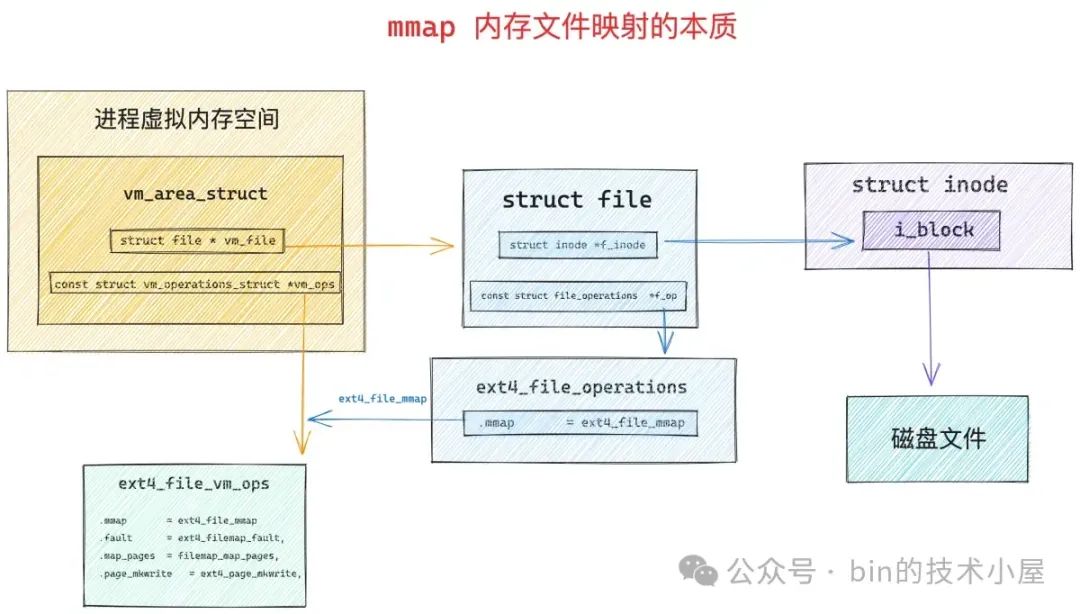
当虚拟内存与映射文件发生关联之后,内核会通过 call_mmap 函数,将虚拟内存 vm_area_struct 的相关操作函数 vma->vm_ops 映射成文件相关的操作函数(和底层文件系统的实现相关)—— ext4_file_vm_ops。这样一来,进程后续对这段虚拟内存的读写就相当于是读写映射文件了。
static int ext4_file_mmap(struct file *file, struct vm_area_struct *vma)
{
vma->vm_ops = &ext4_file_vm_ops;
}
到这里,mmap 系统调用的整个映射过程就结束了,从上面的内核处理过程中我们可以看到,当我们调用 mmap 之后,OS 内核只是会为我们分配一段虚拟内存,然后将虚拟内存与磁盘文件进行映射,整个过程都只是在和虚拟内存打交道,并未出现任何物理内存的身影。而这段虚拟内存在 Java 层面就是 MappedByteBuffer。
1.1 私有文件映射下的 MappedByteBuffer
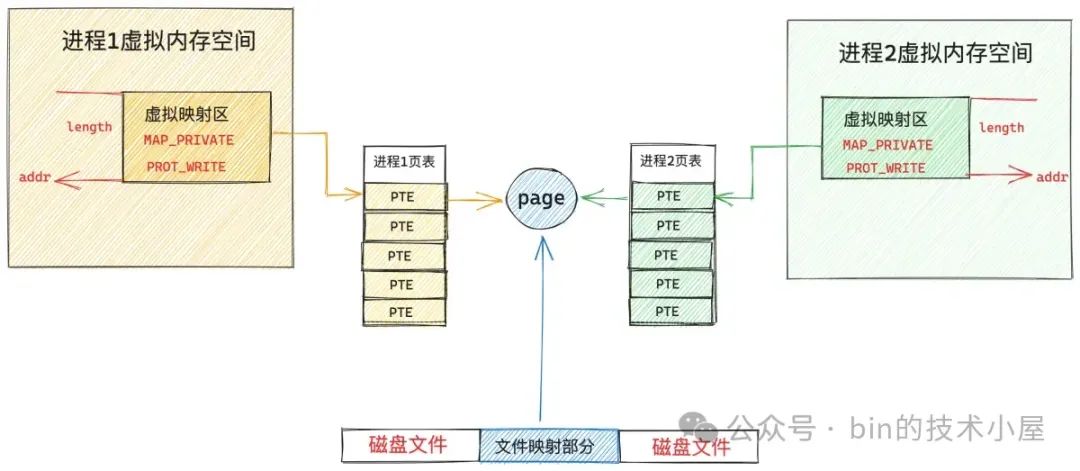
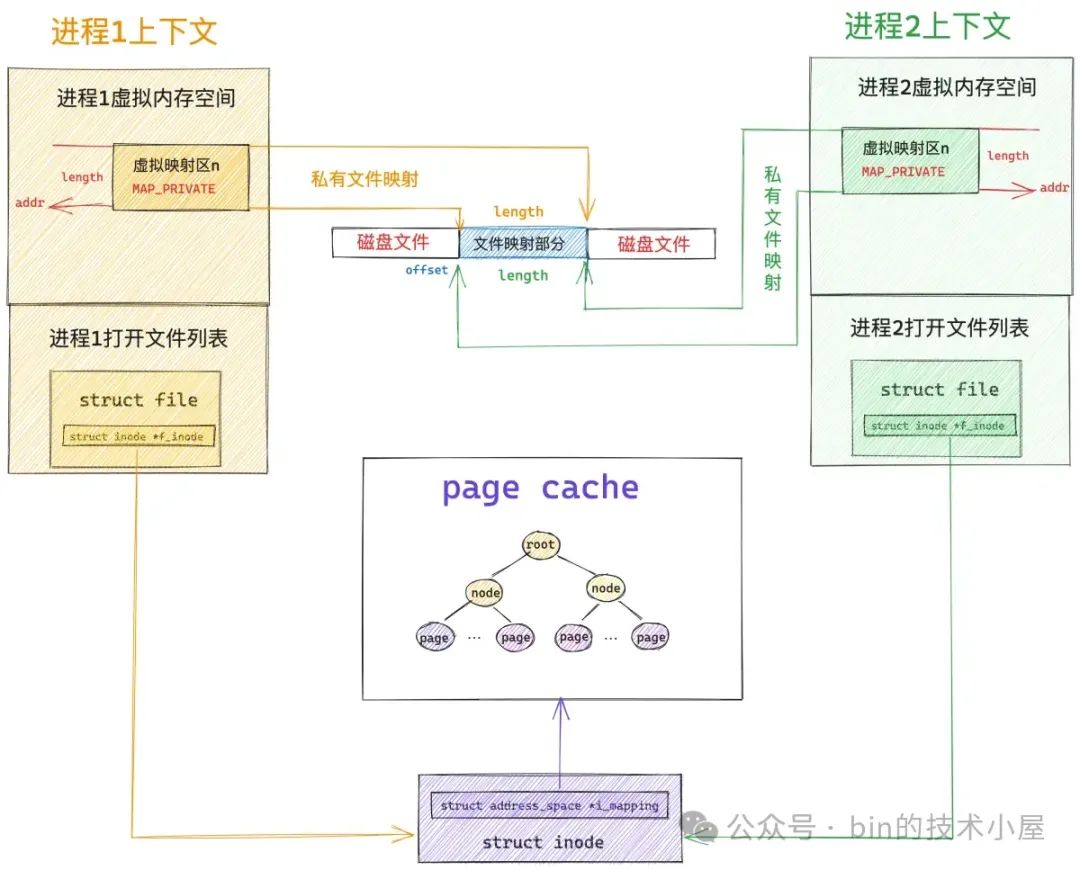
下图展示的是当多个 JVM 进程通过 mmap 对同一个磁盘文件上的同一段文件区域进行内存映射之后,OS 内核中的内存文件映射结构图,我们先以私有文件映射进行说明:
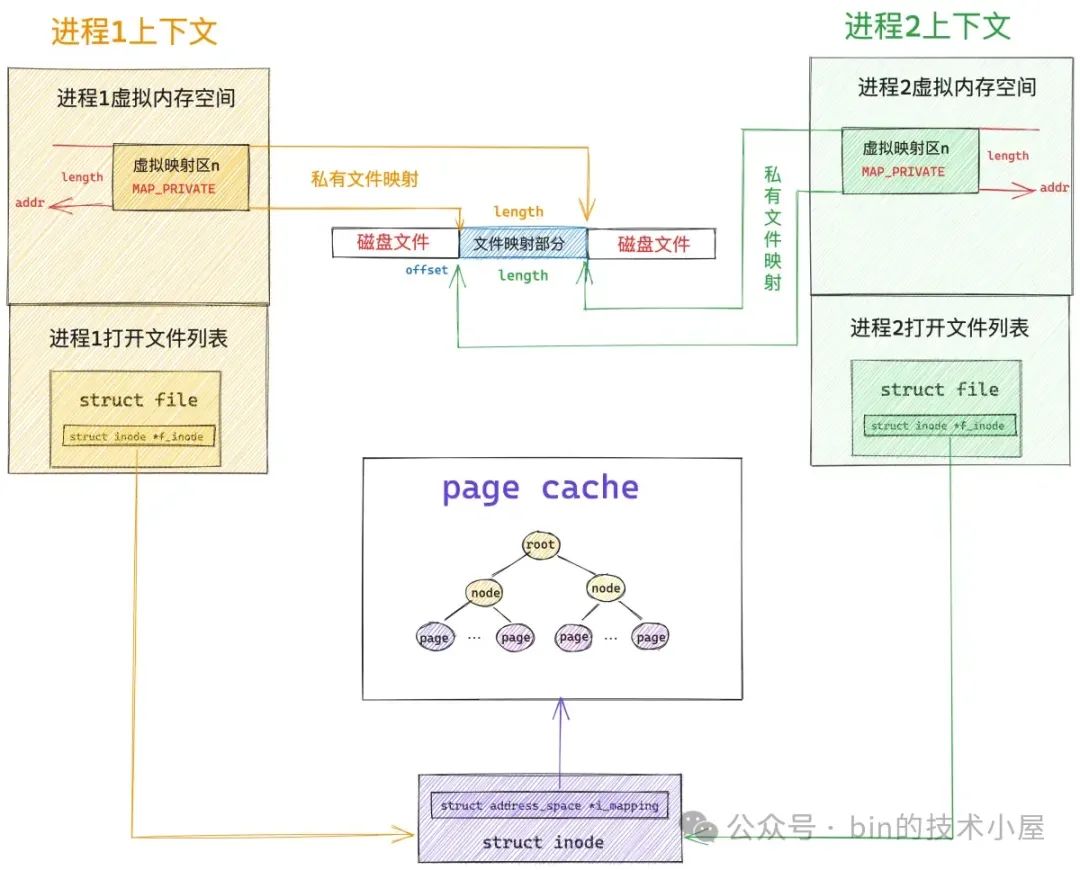
由于现在我们只是刚刚完成了文件映射,仅仅只是在 JVM 层面得到了一个 MappedByteBuffer,这个 MappedByteBuffer 背后所依赖的虚拟内存就是我们通过 mmap 映射出来的。
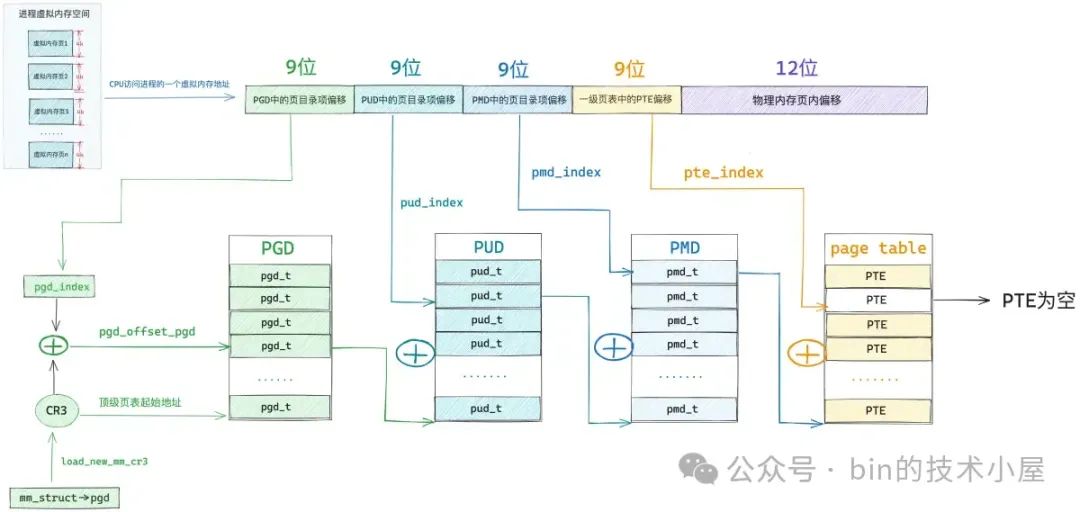
此时我们还未对文件进行读写操作,所以该映射文件对应的 page cache 里还是空,没有任何文件页(用于存储文件数据的物理内存页)。而虚拟内存(MappedByteBuffer)与物理内存之间的关联是通过进程页表来完成的,由于此时内核还未对 MappedByteBuffer 分配物理内存,所以 MappedByteBuffer 在 JVM 进程页表中对应的页表项 PTE 还是空的。
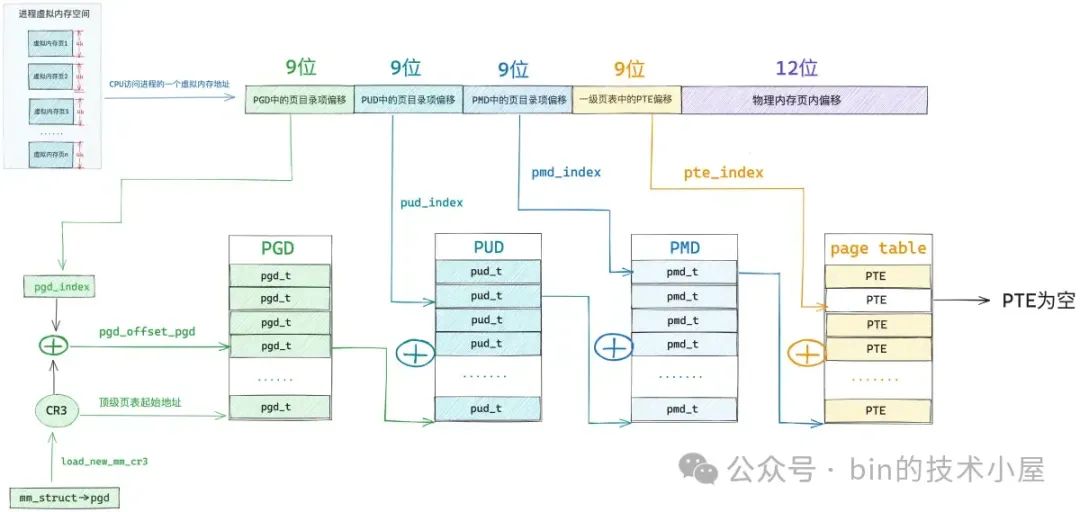
当我们开始访问这段 MappedByteBuffer 的时候, CPU 会将 MappedByteBuffer 背后的虚拟内存地址送到 MMU 地址翻译单元中进行地址翻译查找其背后的物理内存地址。
如果 MMU 发现 MappedByteBuffer 在 JVM 进程页表中对应的页表项 PTE 还是空的,这说明 MappedByteBuffer 是刚刚被 mmap 系统调用映射出来的,还没有分配物理内存。
于是 MMU 就会产生缺页中断,随后 JVM 进程切入到内核态,进行缺页处理,为 MappedByteBuffer 分配物理内存。
static vm_fault_t handle_pte_fault(struct vm_fault *vmf)
{
// pte 是空的,表示 MappedByteBuffer 背后还从来没有映射过物理内存,接下来就要处理物理内存的映射
if (!vmf->pte) {
// 判断缺页的虚拟内存地址 address 所在的虚拟内存区域 vma 是否是匿名映射区
if (vma_is_anonymous(vmf->vma))
// 处理匿名映射区发生的缺页
return do_anonymous_page(vmf);
else
// 处理文件映射区发生的缺页,JDK 的 MappedByteBuffer 属于文件映射区
return do_fault(vmf);
}
}
内核在 do_fault 函数中处理 MappedByteBuffer 缺页的时候,首先会调用 find_get_page 从映射文件的 page cache 中尝试获取文件页,前面已经说了,当 MappedByteBuffer 刚刚被映射出来的时候,映射文件的 page cache 还是空的,没有缓存任何文件页,需要映射到内存的文件内容此时还静静地躺在磁盘上。
当文件页不在 page cache 中,内核则会调用 do_sync_mmap_readahead 来同步预读,这里首先会分配一个物理内存页出来,然后将新分配的内存页加入到 page cache 中,并增加页引用计数。
如果文件页已经缓存在 page cache 中了,则调用 do_async_mmap_readahead 启动异步预读机制,将相邻的若干文件页一起预读进 page cache 中。
随后会通过 address_space_operations (page cache 相关的操作函数集合)中定义的 readpage 激活块设备驱动从磁盘中读取映射的文件内容并填充到 page cache 里的文件页中。
vm_fault_t filemap_fault(struct vm_fault *vmf)
{
// 获取映射文件
struct file *file = vmf->vma->vm_file;
// 获取 page cache
struct address_space *mapping = file->f_mapping;
// 获取映射文件的 inode
struct inode *inode = mapping->host;
// 获取映射文件内容在文件中的偏移
pgoff_t offset = vmf->pgoff;
// 从 page cache 读取到的文件页,存放在 vmf->page 中返回
struct page *page;
// 根据文件偏移 offset,到 page cache 中查找对应的文件页
page = find_get_page(mapping, offset);
if (likely(page) && !(vmf->flags & FAULT_FLAG_TRIED)) {
// 如果文件页在 page cache 中,则启动异步预读,预读后面的若干文件页到 page cache 中
fpin = do_async_mmap_readahead(vmf, page);
} else if (!page) {
// 如果文件页不在 page cache,那么就需要启动 io 从文件中读取内容到 page cache
// 启动同步预读,将所需的文件数据读取进 page cache 中并同步预读若干相邻的文件数据到 page cache
fpin = do_sync_mmap_readahead(vmf);
retry_find:
// 尝试到 page cache 中重新读取文件页,这一次就可以读到了
page = pagecache_get_page(mapping, offset,
FGP_CREAT|FGP_FOR_MMAP,
vmf->gfp_mask);
}
}
..... 省略 ......
}
EXPORT_SYMBOL(filemap_fault);
经过 filemap_fault 函数的处理,此时 MappedByteBuffer 背后所映射的文件内容已经加载到 page cache 中了。
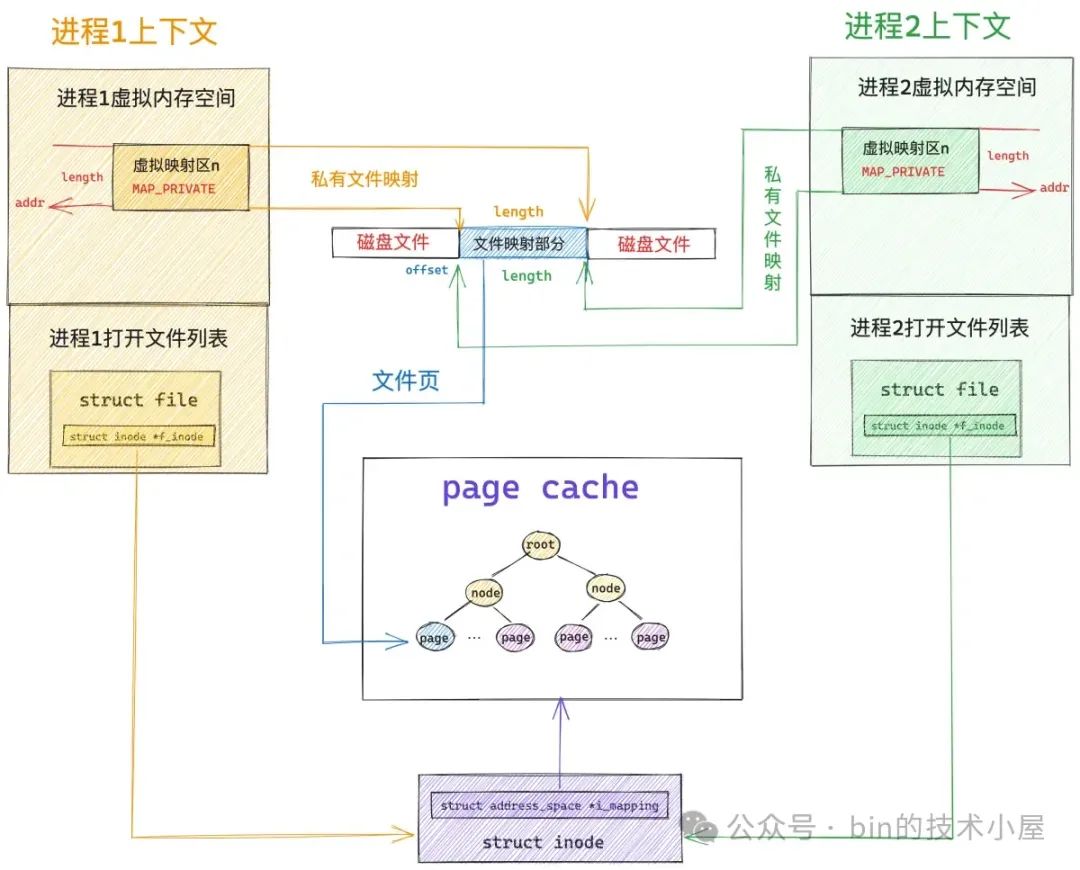
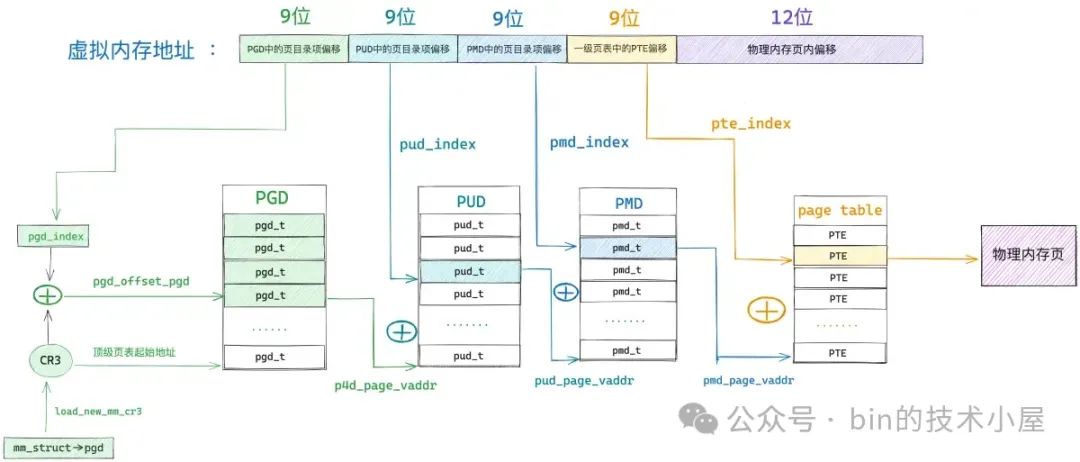
虽然现在 MappedByteBuffer 背后所需要的文件页已经加载到内存中了,但是还没有和 MappedByteBuffer 这段虚拟内存发生关联,缺页处理的最后一步就是通过 JVM 进程页表将 MappedByteBuffer(虚拟内存)与刚刚加载进来的文件页(物理内存)关联映射起来。
既然现在 MappedByteBuffer 在 JVM 进程页表中对应的 pte 是空的,内核就通过 mk_pte 创建一个 pte 出来,并将刚加载进来的文件页的物理内存地址,以及 MappedByteBuffer 相关的操作权限 vm_page_prot,设置到 pte 中。
随后通过 set_pte_at 函数将新初始化的这个 pte 塞到 JVM 页表中。但是这里要注意的是,这里的 MappedByteBuffer 是 mmap 私有映射出来的,所以这个 pte 是只读的。
vm_fault_t alloc_set_pte(struct vm_fault *vmf, struct mem_cgroup *memcg,
struct page *page)
{
// 根据之前分配出来的内存页 pfn 以及相关页属性 vma->vm_page_prot 构造一个 pte 出来
// 对于私有文件映射来说,这里的 pte 是只读的
entry = mk_pte(page, vma->vm_page_prot);
// 将构造出来的 pte (entry)赋值给 MappedByteBuffer 在页表中真正对应的 vmf->pte
// 现在进程页表体系就全部被构建出来了,文件页缺页处理到此结束
set_pte_at(vma->vm_mm, vmf->address, vmf->pte, entry);
// 刷新 mmu
update_mmu_cache(vma, vmf->address, vmf->pte);
return 0;
}
经过这一轮的处理,MappedByteBuffer 与文件页就发生了关联,并且映射的文件内容也已经加载到文件页中了。
后续 JVM 进程在访问这段 MappedByteBuffer 的时候就相当于是直接访问映射文件的 page cache。整个过程是在用户态进行,不需要切态。
假设现在系统中有两个 JVM 进程同时通过 mmap 对同一个磁盘文件上的同一段文件区域进行私有内存映射,那么这两个 JVM 进程就会在各自的内存空间中获取到一段属于各自的 MappedByteBuffer(进程的虚拟内存空间是相互隔离的)。
现在第一个 JVM 进程已经访问过它的 MappedByteBuffer 了,并且已经完成了缺页处理,但是第二个 JVM 进程还没有访问过它的 MappedByteBuffer,所以 JVM 进程2 页表中相应的 pte 还是空的,它访问这段 MappedByteBuffer 的时候仍然会产生缺页中断。
但是 进程2 的缺页处理就很简单了,因为前面 进程1 已经通过缺页中断将映射的文件内容加载到 page cache 中了,所以 进程2 进入到内核中一下就在 page cache 中找到它所需要的文件页了,与属于它的 MappedByteBuffer 通过页表关联一下就可以了。同样是因为采用私有文件映射的原因,进程 2 的这个页表项 pte 也是只读的。
现在 进程1 和 进程2 各自的 MappedByteBuffer 都已经通过各自的页表直接映射到映射文件的 page cache 中了,后续 进程1 和 进程2 对各自的 MappedByteBuffer 进行读取的时候就相当于是直接读取 page cache, 整个过程都发生在用户态,不需要切态,更不需要拷贝。
由于私有文件映射的特点,进程1 和 进程2 各自通过 MappedByteBuffer 对文件的修改是不会回写到磁盘上的,所以现在 进程1 和 进程2 各自页表中对应的 pte 是只读的。
因为现在 MappedByteBuffer 背后直接映射的是 page cache,如果 pte 是可写的话,进程此时对 MappedByteBuffer 的写入操作就会直接反映到 page cache 上,而内核则会定期将 page cache 中的脏页回写到磁盘上,这样一来就违背了私有文件映射的特点了。
所以当这两个 JVM 进程试图对各自的 MappedByteBuffer 进行写入操作时,MMU 会发现 MappedByteBuffer 在进程页表中对应的 pte 是只读的,于是产生写保护类型的缺页中断。
当 JVM 进程进入内核开始缺页处理的时候,内核会发现 MappedByteBuffer 在内核中的权限 —— vma->vm_page_prot 是可写的,但 pte 是只读的,于是开始进行写时复制 —— Copy On Write ,COW 的过程会在 do_wp_page 函数中进行。
static vm_fault_t handle_pte_fault(struct vm_fault *vmf)
{
// 判断本次缺页是否为写时复制引起的
if (vmf->flags & FAULT_FLAG_WRITE) {
// 这里说明 vma 是可写的,但是 pte 被标记为不可写,说明是写保护类型的中断
if (!pte_write(entry))
// 进行写时复制处理,cow 就发生在这里
return do_wp_page(vmf);
}
}
内核在写时复制的时候首先为缺页进程分配一个新的物理内存页 new_page,然后调用 cow_user_page 将 MappedByteBuffer 背后映射的文件页中的内容全部拷贝到新内存页中。
随后通过 mk_pte 创建一个新的临时页表项 entry,利用新的内存页以及之前映射的 MappedByteBuffer 操作权限 —— vma->vm_page_prot 初始化这个临时页表项 entry,让 entry 指向新的内存页,并将 entry 标记为可写。
最后通过 set_pte_at_notify 将 entry 值设置到 MappedByteBuffer 在页表中对应的 pte 中。这样一来,原来的 pte 就由只读变成可写了,而且重新映射到了新分配的内存页上。
static vm_fault_t wp_page_copy(struct vm_fault *vmf)
{
// MappedByteBuffer 在内核中的表现形式
struct vm_area_struct *vma = vmf->vma;
// 当前进程地址空间
struct mm_struct *mm = vma->vm_mm;
// MappedByteBuffer 当前映射在 page cache 中的文件页
struct page *old_page = vmf->page;
// 用于写时复制的新内存页
struct page *new_page = NULL;
// 新申请一个物理内存页,用于写时复制
new_page = alloc_page_vma(GFP_HIGHUSER_MOVABLE, vma,
vmf->address);
if (!new_page)
goto oom;
// 将原来内存页 old page 中的内容拷贝到新内存页 new page 中
cow_user_page(new_page, old_page, vmf->address, vma);
// 创建一个临时的 pte 映射到新内存页 new page 上
entry = mk_pte(new_page, vma->vm_page_prot);
// 设置 entry 为可写的,正是这里, pte 的权限由只读变为了可写
entry = maybe_mkwrite(pte_mkdirty(entry), vma);
// 将 entry 值重新设置到子进程页表 pte 中
set_pte_at_notify(mm, vmf->address, vmf->pte, entry);
// 更新 mmu
update_mmu_cache(vma, vmf->address, vmf->pte);
}
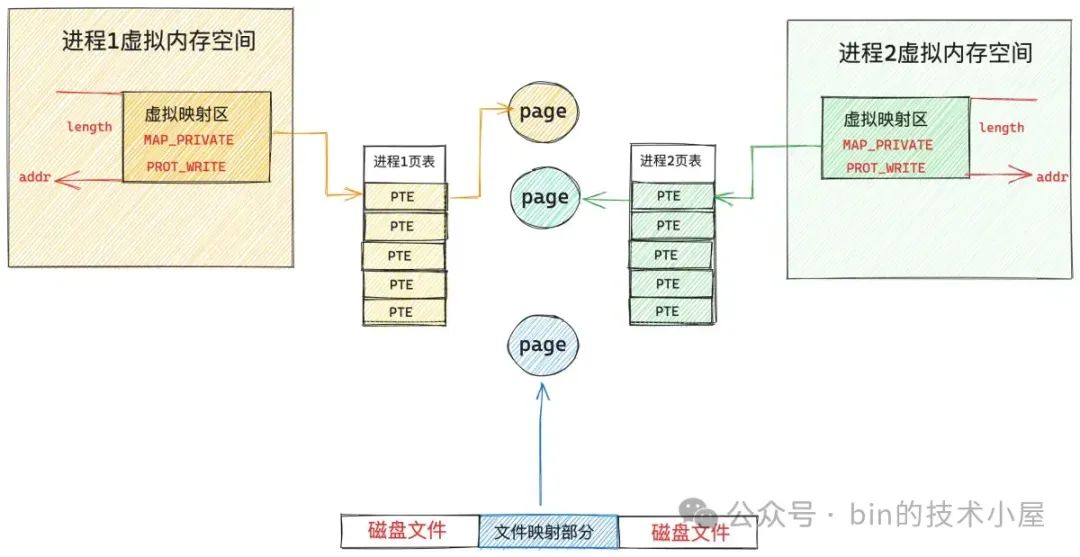
从此进程 1 和进程 2 各自的 MappedByteBuffer 就脱离了 page cache,重新映射到了各自专属的物理内存页上,这个新内存页中的内容和 page cache 中缓存的内容一模一样。
后续这两个 JVM 进程针对 MappedByteBuffer 的任何修改均只能发生在各自的专属物理内存页上,不会体现在 page cache 中,自然这些修改也不会同步到磁盘文件中了,而且各自的修改在进程之间是互不可见的。
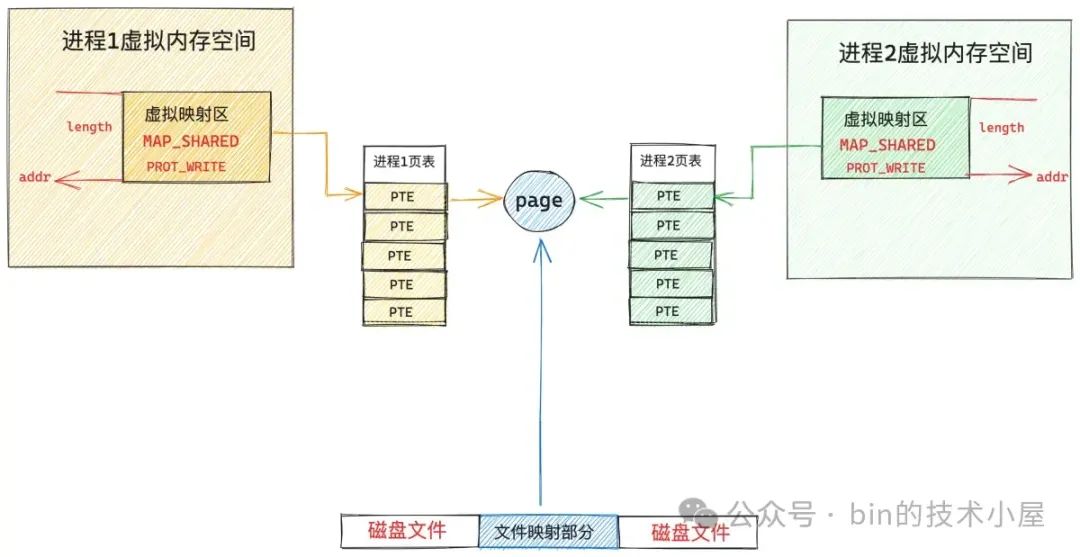
1.2 共享文件映射下的 MappedByteBuffer
共享文件映射与私有文件映射的整个 mmap 映射过程其实是一样的,甚至在缺页处理的大致流程上也是一样的,都是首先要到 page cache 中查找是否有缓存相应的文件页(映射的磁盘块对应的文件页)。
如果文件页不在 page cache 中,内核则会在物理内存中分配一个内存页,然后将新分配的内存页加入到 page cache 中,随后启动磁盘 IO 将共享映射的文件内容 DMA 到新分配的这个内存页里
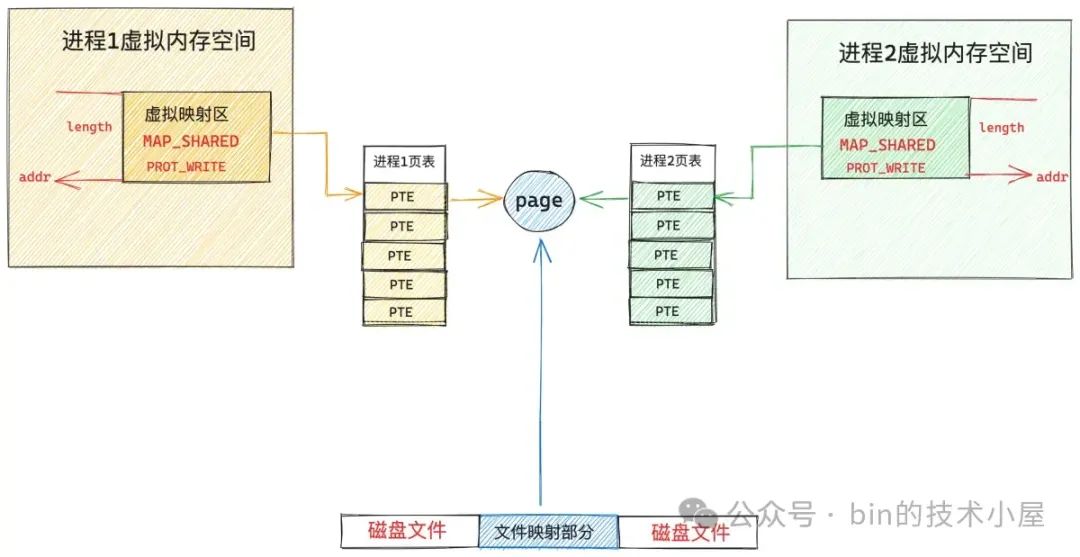
最后在缺页进程的页表中建立共享映射出来的 MappedByteBuffer 与 page cache 缓存的文件页之间的关联。
这里和私有文件映射不同的地方是,私有文件映射由于是私有的,所以在内核创建 PTE 的时候会将 PTE 设置为只读,目的是当进程写入的时候触发写保护类型的缺页中断进行写时复制 (copy on write)。
共享文件映射由于是共享的,PTE 被创建出来的时候就是可写的,后续进程在对 MappedByteBuffer 写入的时候不会触发缺页中断进行写时复制,而是直接写入 page cache 中,整个过程没有切态,没有数据拷贝。
所以对于共享文件映射来说,多进程读写都是共享的,由于多进程直接读写的是 page cache ,所以多进程对各自 MappedByteBuffer 的任何修改,最终都会通过内核回写线程 pdflush 刷新到磁盘文件中。
static vm_fault_t do_shared_fault(struct vm_fault *vmf)
{
struct vm_area_struct *vma = vmf->vma;
vm_fault_t ret, tmp;
// 从 page cache 中读取文件页
ret = __do_fault(vmf);
if (vma->vm_ops->page_mkwrite) {
unlock_page(vmf->page);
// 将文件页变为可写状态,并为后续记录文件日志做一些准备工作
tmp = do_page_mkwrite(vmf);
}
// 将文件页映射到 MappedByteBuffer 在页表中对应的 pte 上
ret |= finish_fault(vmf);
// 将 page 标记为脏页,记录相关文件系统的日志,防止数据丢失
// 判断是否将脏页回写
fault_dirty_shared_page(vma, vmf->page);
return ret;
}
2. JVM 视角下的 MappedByteBuffer
现在笔者已经从 OS 内核的视角将 MappedByteBuffer 最本质的内容给大家剖析完了,基于这个最底层的技术基座,我们把视角在往上移一移,看看 JVM 内部是如何把玩 MappedByteBuffer 的,无非就是对底层系统调用 mmap 的一层封装罢了。
OS 提供的 mmap 系统调用被 JVM 封装在 FileChannelImpl 实现类中的 native 方法 map0 中,在 map0 的底层 native 实现中会直接对 mmap 发起调用。
#include <sys/mman.h>
void* mmap(void* addr, size_t length, int prot, int flags, int fd, off_t offset);
public class FileChannelImpl extends FileChannel
{
// Creates a new mapping
private native long map0(int prot, long position, long length, boolean isSync)
throws IOException;
}
// FileChannelImpl.c 中对 map0 的 native 实现
JNIEXPORT jlong JNICALL
Java_sun_nio_ch_FileChannelImpl_map0(JNIEnv *env, jobject this,
jint prot, jlong off, jlong len, jboolean map_sync)
{
mapAddress = mmap64(
0, /* Let OS decide location */
len, /* Number of bytes to map */
protections, /* File permissions */
flags, /* Changes are shared */
fd, /* File descriptor of mapped file */
off); /* Offset into file */
return ((jlong) (unsigned long) mapAddress);
}
JDK 对用户提供的 mmap 接口封装在下面的 FileChannel#map 方法中,我们可以看到在调用参数的设置上与系统调用 mmap 是非常相似的,毕竟提供底层基座能力的是 mmap,JDK 的 FileChannel#map 只是提供了一层封装而已。
public abstract class FileChannel {
public abstract MappedByteBuffer map(MapMode mode, long position, long size)
throws IOException;
}
2.1 关于 JDK 内存映射参数的解析
FileChannel 中的参数 position 对应于 mmap 系统调用的参数 offset,表示我们要从文件中的哪个位置偏移处开始映射文件内容。
参数 size 对应于 mmap 中的 length ,用于指定我们需要映射的文件区域大小,也就是 MappedByteBuffer 的大小。
参数 MapMode 实际上是对 mmap 系统调用参数 prot 和 flags 的一层封装。
//A file-mapping mode.
public static class MapMode {
/**
* Mode for a read-only mapping.
*/
public static final MapMode READ_ONLY
= new MapMode("READ_ONLY");
/**
* Mode for a read/write mapping.
*/
public static final MapMode READ_WRITE
= new MapMode("READ_WRITE");
/**
* Mode for a private (copy-on-write) mapping.
*/
public static final MapMode PRIVATE
= new MapMode("PRIVATE");
}
READ_ONLY 表示我们进行的是共享文件映射,不过映射出来的 MappedByteBuffer 是只读权限,JVM 在 native 实现中调用 mmap 的时候会将 prot 设置为 PROT_READ,将 flag 设置为 MAP_SHARED。
READ_WRITE 也是进行共享文件映射,映射出来的 MappedByteBuffer 有读写权限,native 实现中会将 prot 设置为 PROT_WRITE | PROT_READ,flag 仍然为 MAP_SHARED。
PRIVATE 则表示进行的是私有文件映射,映射出来的 MappedByteBuffer 有读写权限,native 实现中将 flags 设置为 MAP_PRIVATE, prot 设置为 PROT_WRITE | PROT_READ。
JNIEXPORT jlong JNICALL
Java_sun_nio_ch_FileChannelImpl_map0(JNIEnv *env, jobject this,
jint prot, jlong off, jlong len, jboolean map_sync)
{
if (prot == sun_nio_ch_FileChannelImpl_MAP_RO) { // READ_ONLY
protections = PROT_READ;
flags = MAP_SHARED;
} else if (prot == sun_nio_ch_FileChannelImpl_MAP_RW) { // READ_WRITE
protections = PROT_WRITE | PROT_READ;
flags = MAP_SHARED;
} else if (prot == sun_nio_ch_FileChannelImpl_MAP_PV) { // PRIVATE
protections = PROT_WRITE | PROT_READ;
flags = MAP_PRIVATE;
}
....... 省略 ........
}
除了以上几种常见的映射方式之外,在 JDK14 中又额外扩展了两种新的映射方式,分别为:READ_ONLY_SYNC 和 READ_WRITE_SYNC。
public class ExtendedMapMode {
public static final MapMode READ_ONLY_SYNC = newMapMode("READ_ONLY_SYNC");
public static final MapMode READ_WRITE_SYNC = newMapMode("READ_WRITE_SYNC");
}
我们注意到这两种新的映射方式在命名上只是比之前的映射方式多了一个 _SYNC 后缀。当 MapMode 设置了 READ_ONLY_SYNC 或者 READ_WRITE_SYNC 之后,底层的 native 实现中,会在 mmap 系统调用的 flags 参数中设置两个新的标志 MAP_SYNC | MAP_SHARED_VALIDATE。
JNIEXPORT jlong JNICALL
Java_sun_nio_ch_FileChannelImpl_map0(JNIEnv *env, jobject this,
jint prot, jlong off, jlong len, jboolean map_sync)
{
....... 省略 ........
// should never be called with map_sync and prot == PRIVATE
// 当 MapMode 被设置成了 READ_ONLY_SYNC 或者 READ_WRITE_SYNC 的时候,map_sync 为 true
// map_sync 只能用于共享映射,不能用于私有映射。
assert((prot != sun_nio_ch_FileChannelImpl_MAP_PV) || !map_sync);
if (map_sync) {
flags |= MAP_SYNC | MAP_SHARED_VALIDATE;
}
....... 省略 ........
}
// 内核中扩展的相关 flag 标志
#define MAP_SHARED_VALIDATE 0x03 /* share + validate extension flags */
#define MAP_SYNC 0x080000 /* perform synchronous page faults for the mapping */
这两个新的 flags 标志是 Linux 内核在 4.15 版本之后新加入的两个扩展,主要用于对 non-volatile memory (persistent memory) 进行映射,mmap 的映射范围很广,不仅仅能够对文件进行映射,还能够对匿名的内存页进行映射(正如前面提到的匿名映射),除此之外,mmap 还可以直接对 IO 设备进行映射,比如这里通过 mmap 直接对 persistent memory 进行映射。
2.2 针对 persistent memory 的映射
那么什么是 persistent memory 呢 ? 我们得先从计算机系统中的存储层次结构开始聊起~~~
以下相关图片以及数据来源于:https://docs.pmem.io/persistent-memory/getting-started-guide/introduction
由于摩尔定律的影响,CPU 中的核数越来越多,其处理速度也越来越快,而造价却越来越低,这就造成了提升 CPU 的运行速度比提升内存的运行速度要容易和便宜的多,所以就导致了 CPU 与内存之间的速度差距越来越大。
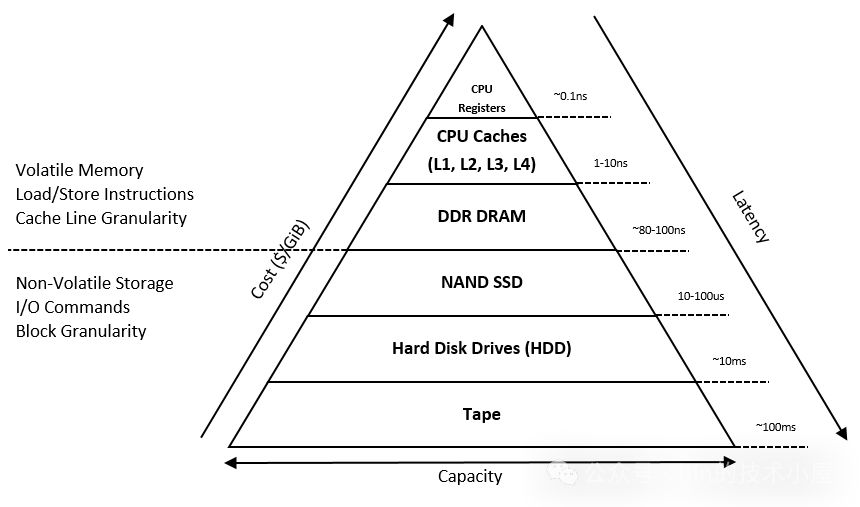
为了填补 CPU 与存储设备之间处理速度的巨大差异,提高 CPU 的处理效率和吞吐,计算机系统又根据局部性原理引入了上图所示的多级存储层次结构。这个存储层次金字塔结构有一个显著的特点就是,从金字塔的底部到顶部的方向来看的话,CPU 访问这些存储设备的速度会越来越快,但这些存储设备的造价也会越来越高,容量越来越小。
比如 CPU 访问速度最快的 Register 寄存器,访问延时为 0.1ns ,那些被 CPU 频繁访问到的数据最应该放到寄存器中,但是寄存器虽然访问速度快,但其造价昂贵,容量很小,所以又引入了 CPU Cache,它的访问延时为 1-10ns 作为寄存器的降级选择,同时也可以弥补一下 CPU 与 DRAM (内存) 速度上的差异。
DRAM 的访问速度是在 80 - 100 ns 这个量级,下面的 SSD 访问延时的量级跨越的就有点大了,直接从 ns 这个量级一下跨越到了 us,访问速度为 10 - 100 us,CPU 访问 SSD 的延时大概是访问 DRAM 延时的 1000 倍。
SSD 下面的 Hard Disk 访问延时量级跨度就更大了,来到了 ms 级,访问速度是 10 ms。而上图所展示的计算机系统存储体系又会根据存储数据的易失性(Volatile)分为两大类:
-
第一类是 Volatile Memory,它包括寄存器,CPU Cache,DRAM,它们的特点是容量有限,CPU 访问的速度快,但是一旦遭遇到断电或者系统崩溃,这些存储设备里的内容就会丢失。
-
第二类是 Non-Volatile Storage,它包括 SSD,Hard Disk。它们的特点是容量大,CPU 访问它们的速度相比于访问 Volatile Memory 会慢上几个数量级,但是遇到断电或者系统崩溃的时候,它们存储的数据不会丢失。
贪婪的成年世界往往喜欢选择既要又要,那么有没有一种存储设备既可以继承 Volatile Memory 访问速度快的特点又可以继承 Non-Volatile Storage 的大容量,且数据不会丢失的特点呢 ? 答案就是 persistent memory (Non-Volatile Memory)。
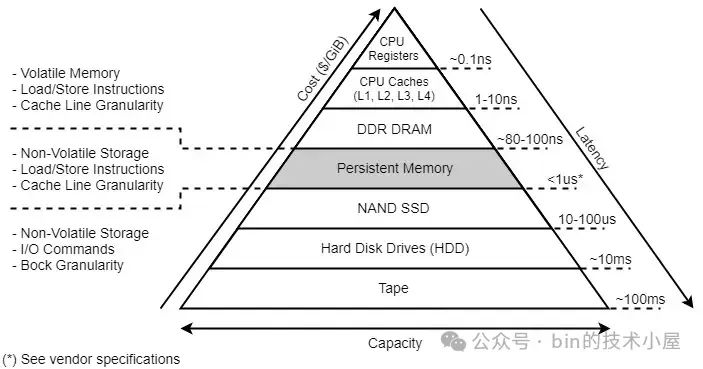
persistent memory 提供了比 SSD , Hard Disk 更快的访问速度(1us),比 DRAM 更大的存储容量(TB 级),更关键的是 persistent memory 具有和 Hard Disk 一样的非易失特性(Non-Volatile),在断电或者系统崩溃之后,存储在 persistent memory 中的数据不会丢失。
从 IO 性能这个角度来对比的话,我们针对传统的磁盘 IO 操作都需要经历内核漫长的 IO 栈,数据首先要经过文件的 page cache,然后通过内核的回写策略或者通过手动调用 msync or fsync 等系统调用,启动磁盘块设备驱动将数据写入到磁盘设备(Non-Volatile Storage)中。整个链路经过了内核的虚拟文件系统,page cache,文件系统,块设备驱动,Non-Volatile Storage。
而且我们对 Non-Volatile Storage 相关的读写,在内核的处理上是按照磁盘块为单位进行的,即使我们只读取几个字节,内核也会将整个磁盘块大小(4K)的数据读取进来,即使我们只写入了几个字节,内核在回写数据的时候也是将整个磁盘块大小的数据回写到磁盘中。
而针对 persistent memory 相关的 IO 操作就大不相同了,我们可以直接通过 CPU 的 load / store 指令来对 persistent memory 中存储的内容进行读写,直接绕过了 page cache, 块设备层等传统的 IO 路径。
一个是直接通过 CPU 指令来读写(persistent memory),一个是通过块设备驱动进行读写(Non-Volatile Storage),性能上的差异显而易见了。
由于我们是通过 CPU 指令来访问 persistent memory,这就使得我们可以按照字节为粒度( byte level access)对 persistent memory 中存储的内容进行寻址,当我们读写 persistent memory 时,不再需要像传统的 Non-Volatile Storage 那样还需要对齐磁盘 block 的大小(4K)。
明明只是读写几个字节,却需要先从磁盘中读取整个 block 的数据,修改几个字节之后,又得把整个 block 回写到磁盘中,而对于具有 byte level access 特性的 persistent memory 来说,我们却可以自由的进行读写,极大的提升了 IO 性能以及减少了不必要的内存占用开销。
无论是 persistent memory 还是传统的 Non-Volatile Storage,当我们对其写完数据之后,也都是需要回写刷新的,否则都有可能面临数据丢失的风险。
比如,我们通过 mmap 系统调用对磁盘上的一个文件进行共享映射之后,针对映射出来的 MappedByteBuffer 进行写入的时候是直接写入到磁盘文件的 page cache 中,并没有写入到磁盘中,此时如果发生断电或者系统崩溃,数据是会丢失的。如果我们需要手动触发数据回写,就需要通过 msync 系统调用将文件中的元数据以及脏页数据通过磁盘块设备回写到磁盘中。
对于 persistent memory 来说也是一样,由于 CPU Cache 的存在,当我们通过 store 指令来向 persistent memory 写入数据的时候,数据会先缓存在 CPU Cache 中,此时的写入数据并没有持久化在 persistent memory 中,如果不巧发生断电或者系统崩溃,数据一样会丢失。
所以对于 persistent memory 来说在写入之后也是需要刷新的,不过这个刷新操作是通过 CLWK 指令(cache line writeback)将 cache line 中的数据 flush 到 persistent memory 中。而不需要像传统 Non-Volatile Storage 通过块设备来回写磁盘。
这也是 Linux 内核在 4.15 版本之后加入 MAP_SYNC 标志的原因,当我们使用 MAP_SYNC 标志通过 mmap 对 persistent memory 进行映射之后,映射出来的这段内存区域 —— MappedByteBuffer ,如果需要进行 force 刷新操作的时候,底层就是通过 CLWK 指令来刷新的,而不是传统的 msync 系统调用。
#define MAP_SYNC 0x080000 /* perform synchronous page faults for the mapping
被 MAP_SYNC 修饰的内存文件映射区会提供一个保证,就是当我们对这段映射出来的 MappedByteBuffer 进行写入操作之前,内核会保证映射文件的相关元数据 metadata 已经被持久化的到 persistent memory 中了。
这也就使得位于 persistent memory 中的文件 metadata 始终处于一致性的状态,在系统崩溃重启的前后,我们看到的文件 metadata 都是一样的。
被 MAP_SYNC 修饰的 MappedByteBuffer 当发生由写入操作引起的缺页中断时会产生一个 synchronous page faults,这也是后缀 _SYNC 要表达的语义,而 synchronous 的数据就是映射文件的 metadata。
如果我们使用 MAP_SYNC 通过 mmap 对 persistent memory 中的文件进行映射的时候,当文件的 metadata 产生脏数据的时候,内核会将这段映射的 persistent memory 在进程页表中对应的页表项 PTE 改为只读的。
随后进程尝试对这段映射区域进行写入的时候,内核中就会产生一个 synchronous page faults,在这个 write page fault 的处理中,内核首先会同步地将文件的 dirty metadata 刷新,然后将 PTE 改为可写。这样就可以保证进程在写入被 MAP_SYNC 修饰的 MappedByteBuffer 之前,映射文件的相关 metadata 已经被刷新了,使得文件始终处于一致性的状态,随后进程就可以放心的写入数据了。
MAP_SYNC 必须和 MAP_SHARED_VALIDATE 一起配合使用:
#define MAP_SHARED_VALIDATE 0x03 /* share + validate extension flags */
MAP_SHARED_VALIDATE 提供的语义和 MAP_SHARED 是一样的,唯一不同的是 MAP_SHARED 会忽略掉所有后面扩展的 flags 标志,比如这里的 MAP_SYNC,而 MAP_SHARED_VALIDATE 会校验所有由 mmap 传入的 flags 标志,对于那些不被内核支持的 flags 标志会抛出 EOPNOTSUPP 异常,而 MAP_SHARED 则会直接选择忽略,不会有任何异常。
在实际使用的过程中,我们为了兼容之前老版本的内核,通常会将 MAP_SHARED | MAP_SHARED_VALIDATE | MAP_SYNC 一起设置到 mmap 的 flags 参数中。对于 4.15 之前的内核版本来说,这样设置的语义就相当于 MAP_SHARED, 对于 4.15 之后的内核版本来说,这样设置的语义就相当于是 MAP_SYNC。
当我们调用 JDK 中的 FileChannel#map 方法来对 persistent memory 进行映射的时候,如果我们对 MapMode 设置了 READ_ONLY_SYNC 或者 READ_WRITE_SYNC ,那么在其 native 实现中调用 mmap 的时候,JVM 就会将 flags 参数设置为 MAP_SHARED | MAP_SHARED_VALIDATE | MAP_SYNC。
在 JDK 中的体现是 MappedByteBuffer 的 isSync 属性会被设置为 true :
public abstract class MappedByteBuffer extends ByteBuffer
{
// 当 MapMode 设置了 READ_WRITE_SYNC 或者 READ_ONLY_SYNC(这两个标志只适用于共享映射,不能用于私有映射),isSync 会为 true
// isSync = true 表示 MappedByteBuffer 背后直接映射的是 non-volatile memory 而不是普通磁盘上的文件
// isSync = true 提供的语义当 MappedByteBuffer 在 force 回写数据的时候是通过 CPU 指令完成的而不是 msync 系统调用
// 并且可以保证在文件映射区 MappedByteBuffer 进行写入之前,文件的 metadata 已经被刷新,文件始终处于一致性的状态
// isSync 的开启需要依赖底层 CPU 硬件体系架构的支持
private final boolean isSync;
}
public class FileChannelImpl extends FileChannel
{
private boolean isSync(MapMode mode) {
// Do not want to initialize ExtendedMapMode until
// after the module system has been initialized
return !VM.isModuleSystemInited() ? false :
(mode == ExtendedMapMode.READ_ONLY_SYNC ||
mode == ExtendedMapMode.READ_WRITE_SYNC);
}
}
persistent memory 之上也是需要构建文件系统来进行管理的, 支持 persistent memory 的文件系统有 ext2 ,ext4, xfs, btrfs 等,我们可以通过 mkfs 命令在 persistent memory 设备文件 —— /dev/pmem0 之上构建相应的 persistent memory filesystem 。
mkfs -t xfs /dev/pmem0
然后通过 mount命令将 persistent memory filesystem 挂载到指定的目录 /mnt/pmem/ 中,这样一来,我们就可以在应用程序中通过 mmap 系统调用映射 /mnt/pmem/ 上的文件,映射出来的 MappedByteBuffer 背后就是 persistent memory 了,后续对 MappedByteBuffer 的读写就相当于是直接对 persistent memory 进行读写了,而且是 byte level access 。
mount -o dax /dev/pmem0 /mnt/pmem/
但这里需要注意一点的是,在我们挂载 persistent memory filesystem 时需要特别指定 -o dax,这里的 dax 表示的是 direct access mode,dax 可以使应用程序绕过 page cache 直接去访问映射的 persistent memory。
MAP_SYNC 只支持映射 dax 模式下挂载的 filesystem 上的文件
当我们通过 mmap 系统调用映射普通磁盘(Non-Volatile Storage)上的文件到进程空间中的 MappedByteBuffer 的时候,MappedByteBuffer 背后其实映射的是磁盘文件的 page cache 。
当我们通过 mmap 系统调用映射 persistent memory filesystem 上的文件到 MappedByteBuffer 的时候,MappedByteBuffer 背后直接映射的就是 persistent memory。
由于我们映射的是 persistent memory ,所以也就不再需要 page cache 来对映射内容重复再做一层拷贝了,我们直接访问 persistent memory 就可以。
2.3 JDK 内存映射的整体框架
到这里,关于 FileChannelImpl#map 方法中相关调用参数的信息笔者就为大家交代完了,通过以上内容的介绍,我们最起码对 JDK 如何封装 mmap 系统调用有了一个总体框架层面上的认识,下面笔者继续为大家补充一下封装的细节。
public class FileChannelImpl extends FileChannel
{
public MappedByteBuffer map(MapMode mode, long position, long size) throws IOException {
// 映射长度不能超过 Integer.MAX_VALUE,最大可以映射 2G 大小的内存
if (size > Integer.MAX_VALUE)
throw new IllegalArgumentException("Size exceeds Integer.MAX_VALUE");
// 当 MapMode 设置了 READ_WRITE_SYNC 或者 READ_ONLY_SYNC(这两个标志只适用于共享映射,不能用于私有映射),isSync 会为 true
// isSync = true 表示 MappedByteBuffer 背后直接映射的是 non-volatile memory 而不是普通磁盘上的文件
// isSync = true 提供的语义是当 MappedByteBuffer 在 force 回写数据的时候是通过 CPU 指令完成的而不是 msync 系统调用
// 并且可以保证在对文件映射区 MappedByteBuffer 进行写入之前,文件的 metadata 已经被刷新,文件始终处于一致性的状态
// isSync 的开启需要依赖底层 CPU 硬件体系架构的支持
boolean isSync = isSync(Objects.requireNonNull(mode, "Mode is null"));
// MapMode 转换成相关 prot 常量
int prot = toProt(mode);
// 进行内存映射,映射成功之后,相关映射区的信息,比如映射起始地址,映射长度,映射文件等等会封装在 Unmapper 里返回
// MappedByteBuffer 的释放也封装在 Unmapper中
Unmapper unmapper = mapInternal(mode, position, size, prot, isSync);
// 根据 Unmapper 中的信息创建 MappedByteBuffer
// 当映射 size 指定为 0 时,unmapper = null,随后会返回一个空的 MappedByteBuffer
if (unmapper == null) {
// a valid file descriptor is not required
FileDescriptor dummy = new FileDescriptor();
if ((!writable) || (prot == MAP_RO))
return Util.newMappedByteBufferR(0, 0, dummy, null, isSync);
else
return Util.newMappedByteBuffer(0, 0, dummy, null, isSync);
} else if ((!writable) || (prot == MAP_RO)) {
// 如果我们指定的是 read-only 的映射方式,这里就会创建一个只读的 MappedByteBufferR 出来
return Util.newMappedByteBufferR((int)unmapper.cap,
unmapper.address + unmapper.pagePosition,
unmapper.fd,
unmapper, isSync);
} else {
return Util.newMappedByteBuffer((int)unmapper.cap,
unmapper.address + unmapper.pagePosition,
unmapper.fd,
unmapper, isSync);
}
}
}
在开始映射之前,JDK 首先会通过 toProt 方法将参数 MapMode 指定的相关枚举值转换成 MAP_ 前缀的常量值,后续进入 native 实现的时候,JVM 会根据这个常量值来设置 mmap 系统调用参数 prot 以及 flags。
private static final int MAP_INVALID = -1;
private static final int MAP_RO = 0;
private static final int MAP_RW = 1;
private static final int MAP_PV = 2;
private int toProt(MapMode mode) {
int prot;
if (mode == MapMode.READ_ONLY) {
// 共享只读
prot = MAP_RO;
} else if (mode == MapMode.READ_WRITE) {
// 共享读写
prot = MAP_RW;
} else if (mode == MapMode.PRIVATE) {
// 私有读写
prot = MAP_PV;
} else if (mode == ExtendedMapMode.READ_ONLY_SYNC) {
// 共享 non-volatile memory 只读
prot = MAP_RO;
} else if (mode == ExtendedMapMode.READ_WRITE_SYNC) {
// 共享 non-volatile memory 读写
prot = MAP_RW;
} else {
prot = MAP_INVALID;
}
return prot;
}
随后 JDK 调用 mapInternal 方法对文件进行内存映射,关于内存映射的细节全部都封装在这个方法中,之前介绍的 native 方法 map0 就是在这里被 JDK 调用的。
public class FileChannelImpl extends FileChannel
{
// Creates a new mapping
private native long map0(int prot, long position, long length, boolean isSync)
throws IOException;
}
map0 会将 mmap 在进程地址空间中映射出来的虚拟内存区域的起始地址 addr 返回给 JDK 。
private Unmapper mapInternal(MapMode mode, long position, long size, int prot, boolean isSync) throws IOException
{
addr = map0(prot, mapPosition, mapSize, isSync);
Unmapper um = (isSync
? new SyncUnmapper(addr, mapSize, size, mfd, pagePosition)
: new DefaultUnmapper(addr, mapSize, size, mfd, pagePosition));
}
最后 JDK 会将这块虚拟内存区域的相关信息,比如起始映射地址,映射长度等信息全部封装在 Unmapper 类中,随后根据这些封装在 Unmapper 类中的信息创建初始化 MappedByteBuffer 并返回给上层应用程序。
Util.newMappedByteBuffer((int)unmapper.cap,
unmapper.address + unmapper.pagePosition,
unmapper.fd,
unmapper, isSync);
具体这个 Unmapper 类是干什么的,里面封装的这些属性具体的含义我们先不用管,后面笔者在介绍到具体映射细节的时候会详细介绍。这里我们只需要知道 unmapper.fd 封装的是映射文件的文件描述符,unmapper.address + unmapper.pagePosition 表示的是 MappedByteBuffer 的起始映射地址,unmapper.cap 表示的是 MappedByteBuffer 的总体容量 capacity。先记住这个结构,后面我们在讨论为什么。
public abstract class MappedByteBuffer extends ByteBuffer
{
// unmapper.fd
private final FileDescriptor fd;
private final boolean isSync;
// unmapper.address + unmapper.pagePosition
long address;
// unmapper.cap
private int limit;
// unmapper.cap
private int capacity;
private int mark = -1;
private int position = 0;
}
上面出现的这些 MappedByteBuffer 相关属性的具体含义以及作用,笔者已经在《一步一图带你深入剖析 JDK NIO ByteBuffer 在不同字节序下的设计与实现》 一文中讲述 ByteBuffer 总体设计与实现的时候详细介绍过了,忘记的同学可以在回看下。
2.4 一些映射细节
下面的内容我们主要来聚焦一些映射的细节,顺便给大家解答一下 Unmapper 类中究竟封装了哪些信息。
2.4.1 Unmapper 到底包装了哪些映射信息
我们都知道,FileChannel#map 函数中的 position 参数指定的是我们期望从磁盘文件中的哪个位置偏移处开始映射,参数 size 用于指定我们期望的映射长度。
public abstract class FileChannel {
public abstract MappedByteBuffer map(MapMode mode, long position, long size)
throws IOException;
}
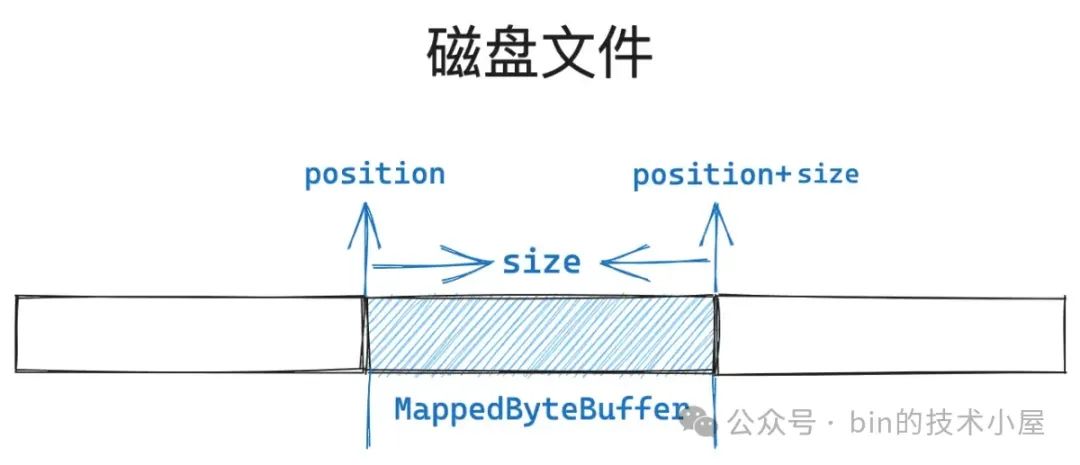
我们使用 FileChannel#map 函数得到的这个 MappedByteBuffer 背后其实是对 [position, position+size] 这段文件区域的映射。
不过这只是我们站在 JVM 视角中观察到的现象,但站在 OS 内核的视角中却不一定是这样映射的,JDK 使用了一个障眼法将本质给隐藏了。
磁盘文件在文件系统中是按照磁盘块为单位组织管理的,当磁盘块加载到内存中就变成了文件页,它们的大小都是 4K,内核对于内存的管理也是按照内存页 page 为单位进行了,包括本文中介绍的内存映射,也是按照 page 为粒度进行映射的。
所以我们在应用程序中指定的相关映射参数,比如这里的 position 以及 size 都应该是按照内存页 page 尺寸对齐的,如果没有对齐,JDK 和内核都会默默的帮助我们进行对齐。
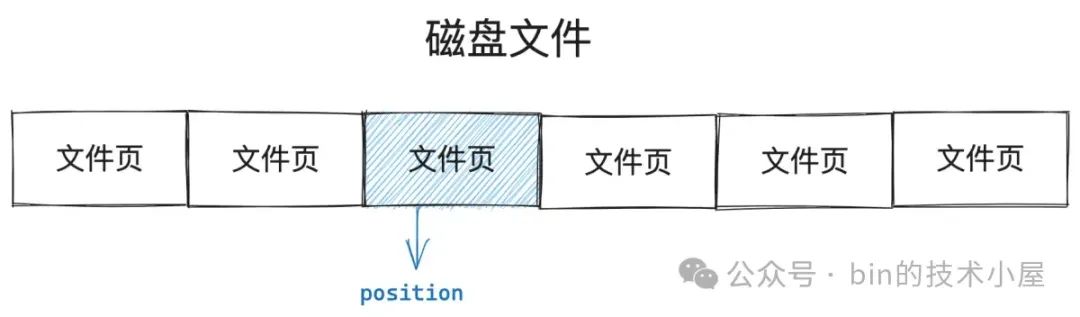
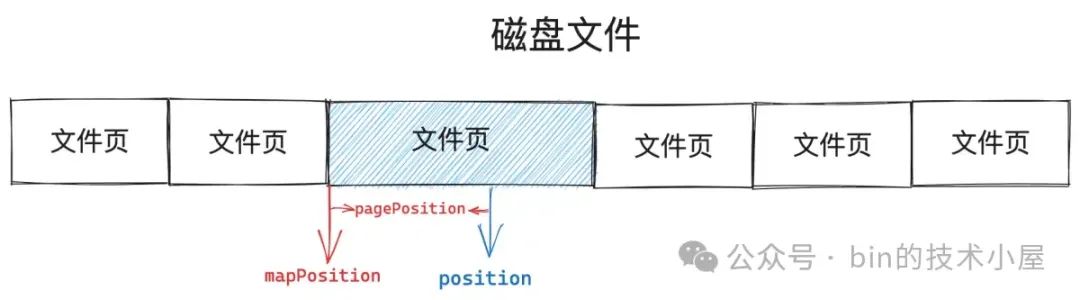
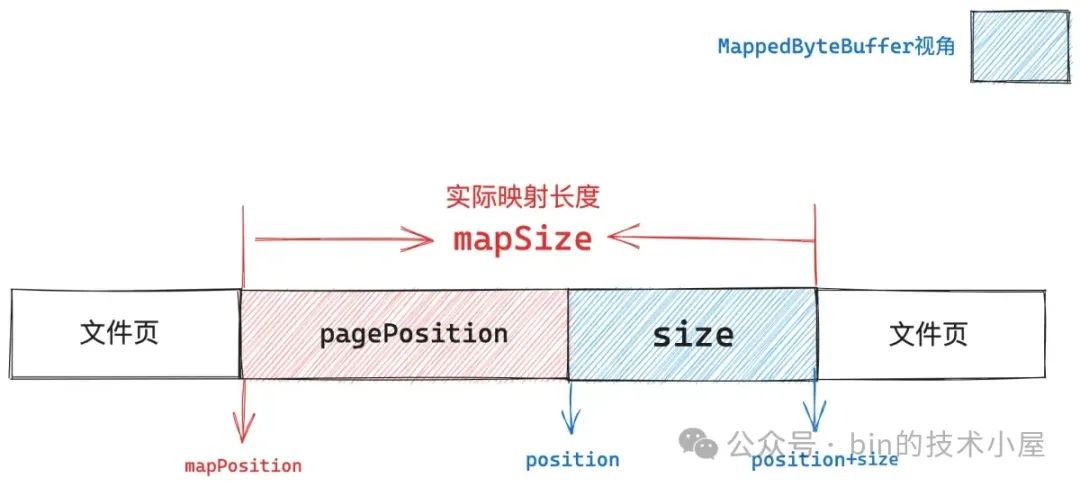
如上图所示,假设我们指定的 position 没有与文件页的尺寸进行对齐,那么内核则不会从一个没有对齐的位置处开始映射,而是会选择 position 所在文件页的起始位置处( mapPosition)开始映射。
// position 距离其所在文件页起始位置的距离
// allocationGranularity 表示内存映射的单位粒度,这里是 4K (内存页尺寸)
pagePosition = (int)(position % allocationGranularity);
// mapPosition 内核真正开始的映射位置,同 mmap 系统调用中的 offset 参数
// 这里的 mapPosition 为 position 所属文件页的起始位置
long mapPosition = position - pagePosition;
我们原本期望的是从文件的 position 处开始映射,并映射长度为 size 大小的文件区域,由于我们指定的 position 没有与文件页尺寸对齐,所以内核选择从文件的 mapPosition 位置处开始映射。
这样一来,如果我们继续按照原本的 size 大小进行映射的话,那么映射出来的文件区域肯定小了,所以这里需要调整映射的长度,在原来的映射长度 size 的基础上,多映射 pagePosition 大小的区域出来。总体映射长度为 mapSize。
// 映射位置 mapPosition 是通过 position 减去了 pagePosition 得到的
// 所以这里的映射长度 mapSize 需要把 pagePosition 加回来
mapSize = size + pagePosition;
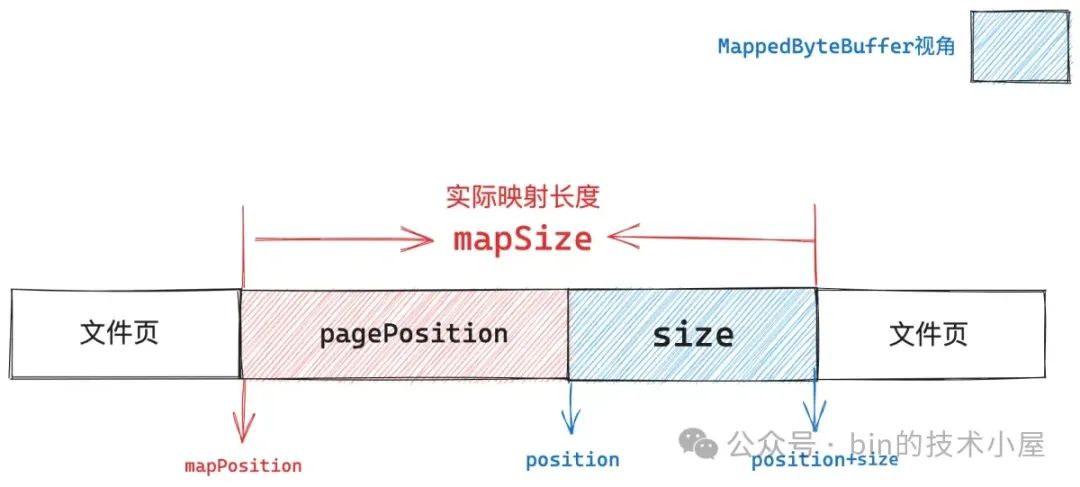
上图中展示这段 [position, position+size] 蓝色文件区域是我们原本指定的文件映射区域,FileChannel#map 函数中返回的 MappedByteBuffer 背后映射的就是这段文件区域。
而内核真实映射的文件区域其实是从 mapPosition 开始,映射长度为 mapSize 的这段文件区域。
addr = map0(prot, mapPosition, mapSize, isSync);
addr 是通过 mmap 在进程虚拟内存空间中映射出来的虚拟内存区域的起始地址,这段虚拟内存区域的内存范围是 [addr, addr+mapSize],背后映射的文件区域范围是 [mapPosition, mapPositionn+mapSize]。
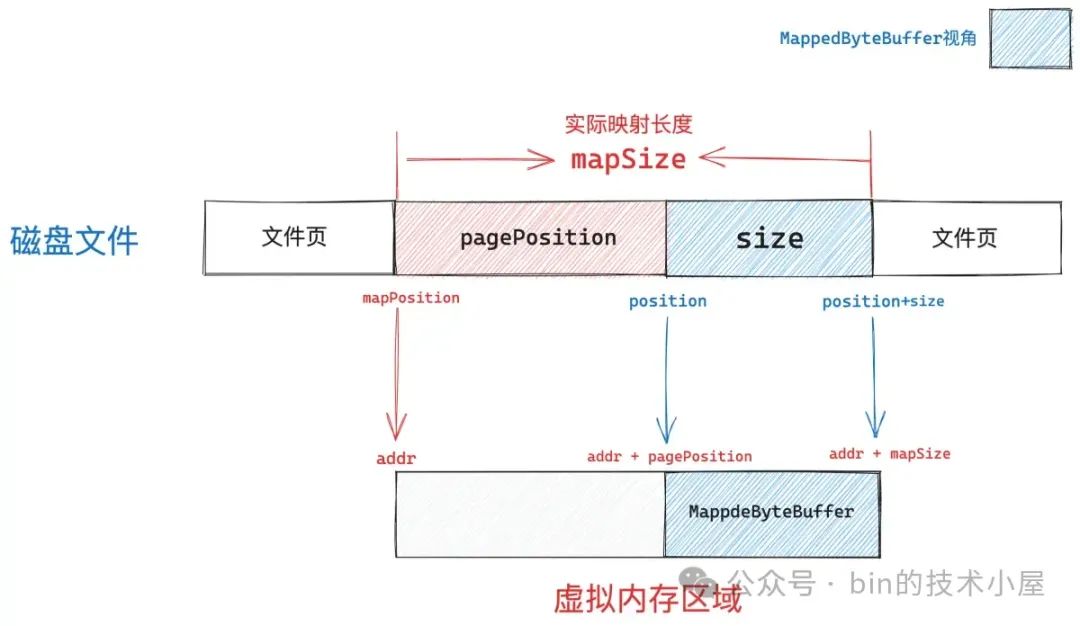
内核映射出来的虚拟内存区域是一个全集,而我们需要的映射区其实是 [addr + pagePosition, addr + mapSize] 这一段映射长度为 size 大小的子集。所以 MappedByteBuffer 的起始地址其实是 addr + pagePosition,整个容量为 size 。
JDK 会将上述介绍的这些映射区域相关信息都封装在 Unmapper 类中。
Unmapper um = (isSync
? new SyncUnmapper(addr, mapSize, size, mfd, pagePosition)
: new DefaultUnmapper(addr, mapSize, size, mfd, pagePosition));
-
mmap 系统调用在进程地址空间真实映射出来的虚拟内存区域起始地址 addr 封装在 Unmapper 类的 address 属性中。
-
虚拟内存区域真实的映射长度 mapSize 封装在 Unmapper 类的 size 属性中。
-
FileChannel#map 函数中指定的 size 参数其实就是 MappedByteBuffer 的真实容量,封装在 Unmapper 类的 cap 属性中。
-
mfd 表示映射文件的 file descriptor,pagePosition 表示我们指定的 position 距离其所在文件页起始位置的距离。
-
Unmapper 中封装的 address 与 pagePosition 一相加就得到了 MappedByteBuffer 的起始内存地址。
private static class DefaultUnmapper extends Unmapper {
public DefaultUnmapper(long address, long size, long cap,
FileDescriptor fd, int pagePosition) {
// 封装映射出来的虚拟内存区域 MappedByteBuffer 相关信息,比如,起始映射地址,映射长度 等等
super(address, size, cap, fd, pagePosition);
incrementStats();
}
}
private static abstract class Unmapper implements Runnable, UnmapperProxy {
// 通过 mmap 系统调用在进程地址空间中映射出来的虚拟内存区域的起始地址
private volatile long address;
// mmap 映射出来的真实虚拟内存区域大小
protected final long size;
// MappedByteBuffer 的容量 cap (由 FileChannel#map 参数 size 指定)
protected final long cap;
private final FileDescriptor fd;
private final int pagePosition;
private Unmapper(long address, long size, long cap,
FileDescriptor fd, int pagePosition)
{
assert (address != 0);
this.address = address;
this.size = size;
this.cap = cap;
this.fd = fd;
this.pagePosition = pagePosition;
}
}
除此之外,Unmapper 中还封装了 JVM 进程对于内存映射的相关统计信息:
-
count 用于记录 JVM 进程调用 mmap 进行内存文件映射的总次数
-
totalSize 是站在内核的视角中,统计 mmap 映射出来的虚拟内存总大小,这个是虚拟内存占用的真实用量。
-
totalCapacity 是站在 JVM 的视角中,统计所有 MappedByteBuffer 占用虚拟内存的总大小。
private static class DefaultUnmapper extends Unmapper {
// keep track of non-sync mapped buffer usage
// jvm 调用 mmap 进行内存文件映射的总次数
static volatile int count;
// jvm 在进程地址空间中映射出来的真实虚拟内存总大小(内核角度的虚拟内存占用)
// 所有 mapSize 的总和
static volatile long totalSize;
// jvm 中所有 MappedByteBuffer 占用虚拟内存的总大小(jvm角度的虚拟内存占用)
// 所有 size 的总和
static volatile long totalCapacity;
// 每一次映射都会调用该方法
protected void incrementStats() {
synchronized (DefaultUnmapper.class) {
count++;
totalSize += size;
totalCapacity += cap;
}
}
}
Unmapper 中的 unmap 方法用于释放本次通过 mmap 在进程地址空间中映射出来的真实虚拟内存区域,这里笔者还是要强调一下,mmap 映射出来的虚拟内存区域范围为 [addr, addr + mapSize],这个是真实的虚拟内存用量。
我们在 Java 程序中看到的 MappedByteBuffer 只是这段虚拟内存的一个子集,范围为 [addr + pagePosition, addr + mapSize]。所以这里的 unmap 方法释放的是在内核中真实占用的虚拟内存 —— [addr, addr + mapSize]。
private static abstract class Unmapper implements Runnable, UnmapperProxy {
public void unmap() {
if (address == 0)
return;
// 底层调用 unmmap 系统调用,用于释放 [addr, addr+mapSize] 这段 mmap 映射出来的虚拟内存以及物理内存
unmap0(address, size);
address = 0;
// if this mapping has a valid file descriptor then we close it
if (fd.valid()) {
try {
nd.close(fd);
} catch (IOException ignore) {
// nothing we can do
}
}
// incrementStats 的反向操作
decrementStats();
}
}
2.4.2 System.gc 之后到底发生了什么
如果一切顺利的话,内存映射的流程本该到这里就结束了,但是现实中往往有很多异常情况的发生,比如在映射的过程中如果发现内存不足,mmap 系统调用就会返回 ENOMEM 错误,这个错误会被 JVM 在 native 层转换成 OutOfMemoryError 抛出。
JNIEXPORT jlong JNICALL
Java_sun_nio_ch_FileChannelImpl_map0(JNIEnv *env, jobject this,
jint prot, jlong off, jlong len, jboolean map_sync)
{
mapAddress = mmap64(
0, /* Let OS decide location */
len, /* Number of bytes to map */
protections, /* File permissions */
flags, /* Changes are shared */
fd, /* File descriptor of mapped file */
off); /* Offset into file */
if (mapAddress == MAP_FAILED) {
// 虚拟内存不足
if (errno == ENOMEM) {
JNU_ThrowOutOfMemoryError(env, "Map failed");
return IOS_THROWN;
}
return handle(env, -1, "Map failed");
}
return ((jlong) (unsigned long) mapAddress);
}
注意这里的 OutOfMemoryError 指的是虚拟内存不足和物理内存没有关系,因为 mmap 系统调用只是在进程的虚拟内存空间中为本次映射分配出一段虚拟内存区域,并将这段虚拟内存区域与磁盘文件映射起来就结束了,整个过程并不涉及物理内存的分配。
如果 mmap 发现进程的虚拟内存空间不足以划分出我们指定映射长度的虚拟内存区域的话,内核就会返回 ENOMEM 错误给 JVM 进程。
当 JDK 捕获到 OutOfMemoryError 异常的时候,就会意识到此时进程虚拟内存空间中的虚拟内存已经不足了,无法支持本次内存映射,于是就会调用 System.gc 强制触发一次 GC ,试图释放一些虚拟内存出来,然后再次尝试来 mmap 一把,如果进程地址空间中的虚拟内存还是不足,则抛出 IOException 。
private Unmapper mapInternal(MapMode mode, long position, long size, int prot, boolean isSync)
throws IOException
{
try {
// If map0 did not throw an exception, the address is valid
addr = map0(prot, mapPosition, mapSize, isSync);
} catch (OutOfMemoryError x) {
// An OutOfMemoryError may indicate that we've exhausted
// memory so force gc and re-attempt map
System.gc();
try {
Thread.sleep(100);
} catch (InterruptedException y) {
Thread.currentThread().interrupt();
}
try {
addr = map0(prot, mapPosition, mapSize, isSync);
} catch (OutOfMemoryError y) {
// After a second OOME, fail
throw new IOException("Map failed", y);
}
}
}
通常情况下我们应当避免在应用程序中主动调用 System.gc,因为这会导致 JVM 立即触发一次 Full GC,使得整个 JVM 进程陷入到 Stop The World 阶段,对性能会有很大的影响。
但是在本小节的场景中,调用 System.gc 却是有必要的,因为 NIO 中的 DirectByteBuffer 非常特殊,当然了 MappedByteBuffer 其实也属于 DirectByteBuffer 的一种。它们背后依赖的内存均属于 JVM 之外(Native Memory),因此不会受垃圾回收的控制。
前面我们多次提过,DirectByteBuffer 只是 OS 中的这些 Native Memory 在 JVM 中的封装形式,DirectByteBuffer 这个 Java 类的实例是分配在 JVM 堆中的,但是这个实例的背后可能会引用着一**的 Native Memory ,这些 Native Memory 是不会被 JVM 察觉的。
当这些 DirectByteBuffer 实例(位于 JVM 堆中)没有任何引用的时候,如果又恰巧碰到 GC 的话,那么 GC 在回收这些 DirectByteBuffer 实例的同时,也会将与其关联的 Cleaner 放到一个 pending 队列中。
protected DirectByteBuffer(int cap, long addr,
FileDescriptor fd,
Runnable unmapper,
boolean isSync, MemorySegmentProxy segment)
{
super(-1, 0, cap, cap, fd, isSync, segment);
address = addr;
// 对于 MappedByteBuffer 来说,在它被 GC 的时候,JVM 会调用这里的 cleaner
// cleaner 近而会调用 Unmapper#unmap 释放背后的 native memory
cleaner = Cleaner.create(this, unmapper);
att = null;
}
当 GC 结束之后,JVM 会唤醒 ReferenceHandler 线程去执行 pending 队列中的这些 Cleaner,在 Cleaner 中会释放其背后引用的 Native Memory。
但在现实的 NIO 使用场景中,DirectByteBuffer 却很难触发 GC,因为 DirectByteBuffer 的实例实在太小了(在 JVM 堆中的内存占用),而且通常情况下这些实例是被应用程序长期持有的,很容易就会晋升到老年代。
即使 DirectByteBuffer 实例已经没有任何引用关系了,由于它的实例足够的小,一时很难把老年代撑爆,所以需要等很久才能触发一次 Full GC,在这之前,这些没有任何引用关系的 DirectByteBuffer 实例将会持续在老年代中堆积,其背后所引用的** Native Memory 将一直不会得到释放。
DirectByteBuffer 的实例可以形象的比喻为冰山对象,JVM 可以看到的只是 DirectByteBuffer 在 JVM 堆中的内存占用,但这部分内存占用很小,就相当于是冰山的一角。

而位于冰山下面的大一片 Native Memory ,JVM 是察觉不到的, 这也是 Full GC 迟迟不会触发的原因,因此导致了大量的 DirectByteBuffer 实例的堆积,背后引用的一** Native Memory 一直得不到释放,严重的情况下可能会导致内核的 OOM,当前进程会被 kill 。
所以在 NIO 的场景下,这里调用 System.gc 去主动触发一次 Full GC 是有必要的。关于 System.gc ,网上的说法众多,其中大部分认为 —— “System.gc 只是给 JVM 的一个暗示或者是提示,但是具体 GC 会不会发生,以及什么时候发生都是不可预期的”。
这个说法以及 Java 标准库中关于 System.gc 的注释都是非常模糊的,那么在 System.gc 被调用之后具体会发生什么行为,我想还是应该到具体的 JVM 实现中去一探究竟,毕竟源码面前了无秘密,下面我们以 hotspot 实现进行说明。
public final class System {
public static void gc() {
Runtime.getRuntime().gc();
}
}
public class Runtime {
public native void gc();
}
System.gc 最终依赖的是 Runtime 类中定义的 gc 方法,该方法是一个 native 实现,定义在 Runtime.c 文件中。
// Runtime.c 文件
JNIEXPORT void JNICALL
Java_java_lang_Runtime_gc(JNIEnv *env, jobject this)
{
JVM_GC();
}
// jvm.cpp 文件
JVM_ENTRY_NO_ENV(void, JVM_GC(void))
// DisableExplicitGC 默认为 false,如果设置了 -XX:+DisableExplicitGC 则为 true
if (!DisableExplicitGC) {
EventSystemGC event;
event.set_invokedConcurrent(ExplicitGCInvokesConcurrent);
// 立即触发一次 full gc
Universe::heap()->collect(GCCause::_java_lang_system_gc);
event.commit();
}
JVM_END
从 hotspot 的实现中我们可以看出,如果我们设置了 -XX:+DisableExplicitGC,那么调用 System.gc 则不会起任何作用,在默认情况下,System.gc 会立即触发一次 Full GC,这一点我们可以从 Universe::heap()->collect 方法的调用看得出来。而且会特殊注明引起本次 GC 的原因 GCCause 为 _java_lang_system_gc。
JVM 堆的实例封装在 Universe 类中,我们可以通过 heap() 方法来获取 JVM 堆的实例,随后调用堆的 collect 方法在 JVM 堆中执行垃圾回收的动作。
// universe.hpp 文件
// jvm 堆实例
static CollectedHeap* _collectedHeap;
static CollectedHeap* heap() { return _collectedHeap; }
Java 堆在 JVM 源码中使用 CollectedHeap 类型来描述,该类型为整个 JVM 堆结构类型的基类,具体的实现类型取决于我们选择的垃圾回收器。比如,当我们选择 ZGC 作为垃圾回收器时,JVM 堆的类型是 ZCollectedHeap,选择 G1 作为垃圾回收器时,JVM 堆的类型则是 G1CollectedHeap。
JVM 在初始化堆的时候,会通过 GCConfig::arguments()->create_heap() 根据我们选择的具体垃圾回收器来创建相应的堆类型,具体的 JVM 堆实例会保存在 _collectedHeap 中,后续通过 Universe::heap() 即可获取。
// universe.cpp 文件
// jvm 堆实例
CollectedHeap* Universe::_collectedHeap = NULL;
jint Universe::initialize_heap() {
assert(_collectedHeap == NULL, "Heap already created");
// 根据 JVM 参数 -XX: 指定的相关 gc 配置创建对应的 heap
// 比如,设置了 -XX:+UseZGC,这里创建的就是 ZCollectedHeap
_collectedHeap = GCConfig::arguments()->create_heap();
log_info(gc)("Using %s", _collectedHeap->name());
// 初始化 jvm 堆
return _collectedHeap->initialize();
}
GCConfig 是 JVM 专门用于封装 GC 相关信息的类,具体创建堆的行为 —— create_heap(),则封装在 GCConfig 类中的 _arguments 属性中(GCArguments 类型)。这里也是一样,不同的垃圾回收器对应不同的 GCArguments,比如,ZGC 对应的是 ZArguments,G1 对应的是 G1Arguments。典型工厂,策略模式的应用,不同的 GCArguments 负责创建不用类型的 JVM 堆。
// gcConfig.cpp 文件
GCArguments* GCConfig::arguments() {
assert(_arguments != NULL, "Not initialized");
// 真正负责创建 jvm 堆的类
return _arguments;
}
JVM 在启动的时候会对 GCConfig 进行初始化,通过 select_gc() 根据我们指定的 -XX: 相关 GC 配置选项来选择具体的 _arguments,比如,我们设置了 -XX:+UseZGC, 这里的 select_gc 就会返回 ZArguments 实例,并保存在 _arguments 属性中,随后我们就可以通过 GCConfig::arguments() 获取。
void GCConfig::initialize() {
assert(_arguments == NULL, "Already initialized");
_arguments = select_gc();
}
select_gc() 的逻辑其实非常简单,核心就是遍历一个叫做 IncludedGCs 的数组,该数组里包含的是当前 JVM 版本中所支持的所有垃圾回收器集合。比如,当我们通过 command line 指定了 -XX:+UseZGC 的时候,相关的 GC 参数 UseZGC 就会为 true,其他的 GC 参数都为 false,如果 JVM 在遍历 IncludedGCs 数组的时候发现,当前遍历元素的 GC 参数为 true,那么就会将对应的 _arguments (zArguments)返回。
// gcConfig.cpp 文件
// Table of included GCs, for translating between command
// line flag, CollectedHeap::Name and GCArguments instance.
static const IncludedGC IncludedGCs[] = {
EPSILONGC_ONLY_ARG(IncludedGC(UseEpsilonGC, CollectedHeap::Epsilon, epsilonArguments, "epsilon gc"))
G1GC_ONLY_ARG(IncludedGC(UseG1GC, CollectedHeap::G1, g1Arguments, "g1 gc"))
PARALLELGC_ONLY_ARG(IncludedGC(UseParallelGC, CollectedHeap::Parallel, parallelArguments, "parallel gc"))
SERIALGC_ONLY_ARG(IncludedGC(UseSerialGC, CollectedHeap::Serial, serialArguments, "serial gc"))
SHENANDOAHGC_ONLY_ARG(IncludedGC(UseShenandoahGC, CollectedHeap::Shenandoah, shenandoahArguments, "shenandoah gc"))
ZGC_ONLY_ARG(IncludedGC(UseZGC, CollectedHeap::Z, zArguments, "z gc"))
};
IncludedGCs 数组的元素类型为 IncludedGC,用于封装具体垃圾回收器的相关配置信息:
// gcConfig.cpp 文件
struct IncludedGC {
// GCArgument,如果我们通过 command line 配置了具体的垃圾回收器
// 那么对应的 IncludedGC 类型中的 _flag 就为 true。
// -XX:+UseG1GC 对应 UseG1GC,-XX:+UseZGC 对应 UseZGC
bool& _flag;
// 具体垃圾回收器的名称
CollectedHeap::Name _name;
// 对应的 GCArguments,后续用于 create_heap
GCArguments& _arguments;
const char* _hs_err_name;
};
select_gc() 就是遍历这个 IncludedGCs 数组,查找 _flag 为 true 的数组项,然后返回其 _arguments。
GCArguments* GCConfig::select_gc() {
// 遍历 IncludedGCs 数组
FOR_EACH_INCLUDED_GC(gc) {
// GCArgument 为 true 则返回对应的 _arguments
if (gc->_flag) {
return &gc->_arguments;
}
}
return NULL;
}
#define FOR_EACH_INCLUDED_GC(var) \
for (const IncludedGC* var = &IncludedGCs[0]; var < &IncludedGCs[ARRAY_SIZE(IncludedGCs)]; var++)
当我们通过设置 -XX:+UseG1GC 选择 G1 垃圾回收器的时候,对应在 GCConfig 中的 _arguments 为 G1Arguments ,通过 GCConfig::arguments()->create_heap() 创建出来的 JVM 堆的类型为 G1CollectedHeap。
CollectedHeap* G1Arguments::create_heap() {
return new G1CollectedHeap();
}
同理,当我们通过设置 -XX:+UseZGC 选择 ZGC 垃圾回收器的时候,JVM 堆的类型为 ZCollectedHeap。
CollectedHeap* ZArguments::create_heap() {
return new ZCollectedHeap();
}
当我们通过设置 -XX:+UseSerialGC 选择 SerialGC 垃圾回收器的时候,JVM 堆的类型为 SerialHeap。
CollectedHeap* SerialArguments::create_heap() {
return new SerialHeap();
}
当我们通过设置 -XX:+UseParallelGC 选择 ParallelGC 垃圾回收器的时候,JVM 堆的类型为 ParallelScavengeHeap。
CollectedHeap* ParallelArguments::create_heap() {
return new ParallelScavengeHeap();
}
当我们通过设置 -XX:+UseShenandoahGC 选择 Shenandoah 垃圾回收器的时候,JVM 堆的类型为 ShenandoahHeap。
CollectedHeap* ShenandoahArguments::create_heap() {
return new ShenandoahHeap(new ShenandoahCollectorPolicy());
}
现在我们已经明确了各个垃圾回收器对应的 JVM 堆类型,而 System.gc 本质上调用的其实就是具体 JVM 堆中的 collect 方法来立即触发一次 Full GC。
// jvm.cpp 文件
JVM_ENTRY_NO_ENV(void, JVM_GC(void))
if (!DisableExplicitGC) {
Universe::heap()->collect(GCCause::_java_lang_system_gc);
}
JVM_END
下面我们就来结合具体的垃圾回收器看一下 System.gc 的行为,长话短说,先把结论抛出来:
-
如果我们在 command line 中设置了
-XX:+DisableExplicitGC,那么调用 System.gc 则不会起任何作用。 -
如果我们选择的垃圾回收器是 SerialGC,ParallelGC,ZGC 的话,那么调用 System.gc 就会立即触发一次 Full GC,整个 JVM 进程会陷入 Stop The World 阶段,调用 System.gc 的线程会一直阻塞,直到整个 Full GC 结束才会返回。
-
如果我们选择的垃圾回收器是 CMS(已在 Java 9 中废弃),G1,Shenandoah,并且在 command line 中设置了
-XX:+ExplicitGCInvokesConcurrent的话,那么在调用 System.gc 则会立即触发一次 Concurrent Full GC,JVM 进程不会陷入 Stop The World 阶段,业务线程和 GC 线程可以并发运行,而且调用 System.gc 的线程在触发 Concurrent Full GC 之后就立即返回了,不需要等到 GC 结束。
2.4.2.1 SerialGC
对于 SerialGC 来说,在调用 System.gc 之后,JVM 背后其实直接调用的是 SerialHeap 的 collect 方法。
// serialHeap.hpp 文件
class SerialHeap : public GenCollectedHeap {
}
由于 SerialHeap 继承的是 GenCollectedHeap,collect 方法是在 GenCollectedHeap 中实现的。
// genCollectedHeap.cpp 文件
void GenCollectedHeap::collect(GCCause::Cause cause) {
// GCCause 为 _java_lang_system_gc 的时候会调用到这里
// Stop-the-world full collection.
collect(cause, OldGen);
}
void GenCollectedHeap::collect(GCCause::Cause cause, GenerationType max_generation) {
collect_locked(cause, max_generation);
}
void GenCollectedHeap::collect_locked(GCCause::Cause cause, GenerationType max_generation) {
// 在这里会触发 Full Gc 的运行
VM_GenCollectFull op(gc_count_before, full_gc_count_before,
cause, max_generation);
// 提交给 VMThread 来执行 Full Gc
VMThread::execute(&op);
}
这里需要注意的是执行这段代码的线程依然是调用 System.gc 的 Java 业务线程,而 JVM 内部的相关操作,比如这里的 GC 操作,均是由 JVM 中的 VMThread 来执行的。
所以这里 Java 业务线程需要将 Full Gc 的任务 —— VM_GenCollectFull 通过 VMThread::execute(&op) 提交给 VMThread 来执行。而 Java 业务线程一直会在这里阻塞等待,直到 VMThread 执行完 Full Gc 之后,Java 业务线程才会从 System.gc 调用中返回。
这样设计也是合理的,因为毕竟 Full Gc 会让整个 JVM 进程陷入 Stop The World 阶段,所有 Java 线程必须到达 SafePoint 之后 Full Gc 才会执行,而我们通过 JNI 进入到 Native 方法的实现之后,由于 Native 代码不会访问 Java 对象、不会调用 Java 方法,不再执行任何字节码指令,所以 Java 虚拟机的堆栈不会发生改变,因此 Native 方法本身就是一个 SafePoint。在 Full Gc 没有结束之前,Java 线程会一直停留在这个 SafePoint 中。
void VMThread::execute(VM_Operation* op) {
// 获取当前执行线程
Thread* t = Thread::current();
if (t->is_VM_thread()) {
// 如果当前线程是 VMThread 的话,直接执行 VM_Operation(Full Gc)
((VMThread*)t)->inner_execute(op);
return;
}
// doit_prologue 为执行 VM_Operation 的前置回调函数,Full Gc 之前执行一些准备校验工作。
// 返回 true 表示可以执行本次 GC 操作, 返回 false 表示忽略本次 GC
// JVM 可能会触发多次 GC 请求,比如多个 java 线程遇到分配失败的时候
// 但我们只需要执行一次 GC 就可以了,其他 GC 请求在这里就会被忽略
// 另外执行 GC 之前需要给 JVM 堆加锁,heap lock 也是在这里完成的。
if (!op->doit_prologue()) {
return; // op was cancelled
}
// java 线程将 Full Gc 的任务提交给 VMThread 执行
// 并且会在这里一直阻塞等待,直到 Full Gc 执行完毕。
wait_until_executed(op);
// 释放 heap lock,唤醒 ReferenceHandler 线程去执行 pending 队列中的 Cleaner
op->doit_epilogue();
}
注意这里的 op->doit_epilogue() 方法,在 GC 结束之后就会调用到这里,而与 DirectByteBuffer 相关联的 Cleaner 正是在这里被触发执行的。
void VM_GC_Operation::doit_epilogue() {
if (Universe::has_reference_pending_list()) {
// 通知 cleaner thread 执行 cleaner,release native memory
Heap_lock->notify_all();
}
// Heap_lock->unlock()
VM_GC_Sync_Operation::doit_epilogue();
}
2.4.2.2 ParallelGC
对于 ParallelGC 来说,在调用 System.gc 之后,JVM 背后其实直接调用的是 ParallelScavengeHeap 的 collect 方法。
// This method is used by System.gc() and JVMTI.
void ParallelScavengeHeap::collect(GCCause::Cause cause) {
VM_ParallelGCSystemGC op(gc_count, full_gc_count, cause);
VMThread::execute(&op);
}
我们通过下面的 is_cause_full 方法可以知道 VM_ParallelGCSystemGC 执行的也是 Full Gc,同样也是需要将 Full Gc 任务提交给 VMThread 执行,Java 业务线程在这里阻塞等待直到 Full Gc 完成。
// Only used for System.gc() calls
VM_ParallelGCSystemGC::VM_ParallelGCSystemGC(uint gc_count,
uint full_gc_count,
GCCause::Cause gc_cause) :
VM_GC_Operation(gc_count, gc_cause, full_gc_count, is_cause_full(gc_cause))
{
}
// 对于 System.gc 来说这里执行的是 full_gc
static bool is_cause_full(GCCause::Cause cause) {
return (cause != GCCause::_gc_locker) && (cause != GCCause::_wb_young_gc)
DEBUG_ONLY(&& (cause != GCCause::_scavenge_alot));
}
2.4.2.3 ZGC
对于 ZGC 来说,在调用 System.gc 之后,JVM 背后其实直接调用的是 ZCollectedHeap 的 collect 方法。JVM 会执行一个同步的 GC 操作,Java 业务线程仍然会在这里阻塞,直到 GC 完成才会返回。
// zCollectedHeap.cpp 文件
void ZCollectedHeap::collect(GCCause::Cause cause) {
_driver->collect(cause);
}
// zDriver.cpp 文件
void ZDriver::collect(const ZDriverRequest& request) {
switch (request.cause()) {
// System.gc
case GCCause::_java_lang_system_gc:
// Start synchronous GC
_gc_cycle_port.send_sync(request);
break;
..... 省略 ,,,,,,
}
}
template <typename T>
inline void ZMessagePort<T>::send_sync(const T& message) {
Request request;
{
// Enqueue message
// 随后 ZDriver 线程会异步从队列中取出 message,执行 gc
MonitorLocker ml(&_monitor, Monitor::_no_safepoint_check_flag);
request.initialize(message, _seqnum);
_queue.insert_last(&request);
// 唤醒 ZDriver 线程执行 gc
ml.notify();
}
// java 业务线程在这里阻塞等待,直到 gc 完成
request.wait();
}
2.4.2.4 G1
对于 G1 来说,在调用 System.gc 之后,JVM 背后其实直接调用的是 G1CollectedHeap 的 collect 方法。
// g1CollectedHeap.cpp 文件
void G1CollectedHeap::collect(GCCause::Cause cause) {
try_collect(cause);
}
G1 这里首先会通过 should_do_concurrent_full_gc 方法判断是否发起一次 Concurrent Full GC,从下面的源码中可以看出,对于 System.gc 来说,该方法其实是对 ExplicitGCInvokesConcurrent 这个 GC 参数的判断。
当我们在 command line 中设置了 -XX:+ExplicitGCInvokesConcurrent 的话,ExplicitGCInvokesConcurrent 为 true,默认为 false。
bool G1CollectedHeap::should_do_concurrent_full_gc(GCCause::Cause cause) {
switch (cause) {
case GCCause::_g1_humongous_allocation: return true;
case GCCause::_g1_periodic_collection: return G1PeriodicGCInvokesConcurrent;
case GCCause::_wb_breakpoint: return true;
// System.gc 会走这里的 default 分支
default: return is_user_requested_concurrent_full_gc(cause);
}
}
bool G1CollectedHeap::is_user_requested_concurrent_full_gc(GCCause::Cause cause) {
switch (cause) {
// System.gc
case GCCause::_java_lang_system_gc: return ExplicitGCInvokesConcurrent;
...... 省略 .....
}
}
当我们设置了 -XX:+ExplicitGCInvokesConcurrent 的时候,System.gc 就会触发一次 Concurrent Full GC,GC 过程不需要经历 Stop The World 阶段,由 G1 相关的 Concurrent GC 线程来执行 Concurrent Full GC 而不是之前的 VMThread。
而且调用 System.gc 的 Java 业务线程在触发 Concurrent Full GC 之后就返回了,不需要等到 GC 执行完毕。
但在默认情况下,也就是没有设置 -XX:+ExplicitGCInvokesConcurrent 的时候,仍然会执行一次完整的 Full GC。
bool G1CollectedHeap::try_collect(GCCause::Cause cause) {
assert_heap_not_locked();
// -XX:+ExplicitGCInvokesConcurrent
if (should_do_concurrent_full_gc(cause)) {
// 由 Concurrent GC 线程来执行
return try_collect_concurrently(cause,
gc_count_before,
old_marking_started_before);
} else {
// Schedule a Full GC.
VM_G1CollectFull op(gc_count_before, full_gc_count_before, cause);
VMThread::execute(&op);
return op.gc_succeeded();
}
}
对于 CMS 来说,虽然它已经在 Java 9 中被废弃了,但从 Java 8 的源码中可以看出,CMS 这里的逻辑(System.gc )和 G1 是一样的,首先都会通过 should_do_concurrent_full_gc 方法来判断是否执行一次 Concurrent Full GC,都是取决于是否设置了 -XX:+ExplicitGCInvokesConcurrent ,否则执行完整的 Full GC。
2.4.2.5 Shenandoah
对于 Shenandoah 来说,在调用 System.gc 之后,JVM 背后其实直接调用的是 ShenandoahHeap 的 collect 方法。
void ShenandoahHeap::collect(GCCause::Cause cause) {
control_thread()->request_gc(cause);
}
首先会通过 is_user_requested_gc 方法判断本次 GC 是否是由 System.gc 所触发的,如果是,则进入 handle_requested_gc 中处理,GCCause 为 java_lang_system_gc 。
// gcCause.hpp 文件
inline static bool is_user_requested_gc(GCCause::Cause cause) {
return (cause == GCCause::_java_lang_system_gc ||
cause == GCCause::_dcmd_gc_run);
}
如果我们在 command line 中设置了 -XX:+DisableExplicitGC,那么这里的 System.gc 将不会起任何作用。
// shenandoahControlThread.cpp
void ShenandoahControlThread::request_gc(GCCause::Cause cause) {
assert(GCCause::is_user_requested_gc(cause) || ....... ,"only requested GCs here");
// System.gc
if (is_explicit_gc(cause)) {
if (!DisableExplicitGC) {
// 没有设置 -XX:+DisableExplicitGC 的情况下会走这里
handle_requested_gc(cause);
}
} else {
handle_requested_gc(cause);
}
}
bool ShenandoahControlThread::is_explicit_gc(GCCause::Cause cause) const {
return GCCause::is_user_requested_gc(cause) ||
GCCause::is_serviceability_requested_gc(cause);
}
调用 System.gc 的 Java 业务线程首先在 handle_requested_gc 方法中会设置 gc 请求标志 _gc_requested.set,ShenandoahControlThread 会定时检测这个 _gc_requested 标志,如果被设置了,则进行后续的 GC 处理。
Java 业务线程最后会一直阻塞在 handle_requested_gc 方法中,如果进行的是 Concurrent Full GC 的话,那么 GC 任务在被提交给对应的 Concurrent GC 线程之后就会唤醒 Java 业务线程。如果执行的是 Full GC 的话,那么当 VMthread 执行完 Full GC 的时候才会唤醒阻塞在这里的 Java 业务线程,随后 Java 线程从 System.gc 调用中返回。
void ShenandoahControlThread::handle_requested_gc(GCCause::Cause cause) {
MonitorLocker ml(&_gc_waiters_lock);
while (current_gc_id < required_gc_id) {
// 设置 gc 请求标志,后续会由 ShenandoahControlThread 来执行
_gc_requested.set();
// java_lang_system_gc
_requested_gc_cause = cause;
if (cause != GCCause::_wb_breakpoint) {
// java 业务线程会在这里阻塞等待
// 对于 Concurrent Full GC 来说,GC 在被触发的时候,java 线程就会被唤醒直接返回
// 对于 Full GC 来说,java 线程需要等到 gc 被执行完才会被唤醒
ml.wait();
}
}
}
ShenandoahControlThread 会根据一定的间隔时间来检测 _gc_requested 标志是否被设置,如果被设置则继续后续的 GC 处理:
-
如果我们设置了
-XX:+ExplicitGCInvokesConcurrent,Shenandoah 会触发一次 Concurrent Full GC ,否则进行的是 Full GC ,这一点和 G1 的处理方式是一样的。 -
最后通过
notify_gc_waiters()唤醒在 handle_requested_gc 中阻塞等待的 java 线程。
void ShenandoahControlThread::run_service() {
ShenandoahHeap* heap = ShenandoahHeap::heap();
// 默认的一些设置,后面会根据配置修改
GCMode default_mode = concurrent_normal;// 并发模式
GCCause::Cause default_cause = GCCause::_shenandoah_concurrent_gc;
while (!in_graceful_shutdown() && !should_terminate()) {
// _gc_requested 如果被设置,后续则会处理 System.gc 的逻辑
bool explicit_gc_requested = _gc_requested.is_set() && is_explicit_gc(_requested_gc_cause);
// Choose which GC mode to run in. The block below should select a single mode.
GCMode mode = none;
if (explicit_gc_requested) {
// java_lang_system_gc
cause = _requested_gc_cause;
log_info(gc)("Trigger: Explicit GC request (%s)", GCCause::to_string(cause));
// -XX:+ExplicitGCInvokesConcurrent
if (ExplicitGCInvokesConcurrent) {
policy->record_explicit_to_concurrent();
// concurrent_normal 并发模式
mode = default_mode;
} else {
policy->record_explicit_to_full();
mode = stw_full; // Full GC 模式
}
}
switch (mode) {
case concurrent_normal:
// 由 concurrent gc 线程异步执行
service_concurrent_normal_cycle(cause);
break;
case stw_full:
// 触发 VM_ShenandoahFullGC ,由 VMthread 同步执行
service_stw_full_cycle(cause);
break;
default:
ShouldNotReachHere();
}
// If this was the requested GC cycle, notify waiters about it
if (explicit_gc_requested || implicit_gc_requested) {
// 唤醒在 handle_requested_gc 中阻塞等待的 java 线程
notify_gc_waiters();
}
}
}
2.5 JDK 完整的内存映射过程
private Unmapper mapInternal(MapMode mode, long position, long size, int prot, boolean isSync)
throws IOException
{
// 确保文件处于 open 状态
ensureOpen();
// 对相关映射参数进行校验
if (mode == null)
throw new NullPointerException("Mode is null");
if (position < 0L)
throw new IllegalArgumentException("Negative position");
if (size < 0L)
throw new IllegalArgumentException("Negative size");
if (position + size < 0)
throw new IllegalArgumentException("Position + size overflow");
// 如果 mode 设置了 READ_ONLY,但文件并没有以读的模式打开,则会抛出 NonReadableChannelExceptio
// 如果 mode 设置了 READ_WRITE 或者 PRIVATE ,那么文件必须要以读写的模式打开,否则会抛出 NonWritableChannelException
// 如果 isSync 为 true,但是对应 CPU 体系架构不支持 cache line write back 指令,那么就会抛出 UnsupportedOperationException
checkMode(mode, prot, isSync);
long addr = -1;
int ti = -1;
try {
// 这里不要被命名误导,beginBlocking 并不会阻塞当前线程,只是标记一下表示当前线程下面会执行一个 IO 操作可能会无限期阻塞
// 而这个 IO 操作是可以被中断的,这里会设置中断的回调函数 interruptor,在线程被中断的时候回调
beginBlocking();
// threads 是一个 NativeThread 的集合,用于暂存阻塞在该 channel 上的 NativeThread,用于后续统一唤醒
ti = threads.add();
// 如果当前 channel 已经关闭,则不能进行 mmap 操作
if (!isOpen())
return null;
// 映射文件大小,同 mmap 系统调用中的 length 参数
long mapSize;
// position 距离其所在文件页起始位置的距离,OS 内核以 page 为单位进行内存管理
// 内存映射的单位也应该按照 page 进行,pagePosition 用于后续将 position,size 与 page 大小对齐
int pagePosition;
// 确保线程串行操作文件的 position
synchronized (positionLock) {
long filesize;
do {
// 底层通过 fstat 系统调用获取文件大小
filesize = nd.size(fd);
// 如果系统调用被中断则一直重试
} while ((filesize == IOStatus.INTERRUPTED) && isOpen());
if (!isOpen())
return null;
// 如果要映射的文件区域已经超过了 filesize 则需要扩展文件
if (filesize < position + size) { // Extend file size
if (!writable) {
throw new IOException("Channel not open for writing " +
"- cannot extend file to required size");
}
int rv;
do {
// 底层通过 ftruncate 系统调用将文件大小扩展至 (position + size)
rv = nd.truncate(fd, position + size);
} while ((rv == IOStatus.INTERRUPTED) && isOpen());
if (!isOpen())
return null;
}
// 映射大小为 0 则直接返回 null,随后会创建一个空的 MappedByteBuffer
if (size == 0) {
return null;
}
// OS 内核是按照内存页 page 为单位来对内存进行管理的,因此我们内存映射的粒度也应该按照 page 的单位进行
// allocationGranularity 表示内存分配的粒度,这里是内存页的大小 4K
// 我们指定的映射 offset 也就是这里的 position 应该是与 4K 对齐的,同理映射长度 size 也应该与 4K 对齐
// position 距离其所在文件页起始位置的距离
pagePosition = (int)(position % allocationGranularity);
// mapPosition 为映射的文件内容在磁盘文件中的偏移,同 mmap 系统调用中的 offset 参数
// 这里的 mapPosition 为 position 所属文件页的起始位置
long mapPosition = position - pagePosition;
// 映射位置 mapPosition 减去了 pagePosition,所以这里的映射长度 mapSize 需要把 pagePosition 加回来
mapSize = size + pagePosition;
try {
// If map0 did not throw an exception, the address is valid
// native 方法,底层调用 mmap 进行内存文件映射
// 返回值 addr 为 mmap 系统调用在进程地址空间真实映射出来的虚拟内存区域起始地址
addr = map0(prot, mapPosition, mapSize, isSync);
} catch (OutOfMemoryError x) {
// An OutOfMemoryError may indicate that we've exhausted
// memory so force gc and re-attempt map
// 如果内存不足导致 mmap 失败,这里触发 Full GC 进行内存回收,前提是没有设置 -XX:+DisableExplicitGC
// 默认情况下在调用 System.gc() 之后,JVM 马上会执行 Full GC,并且等到 Full GC 完成之后才返回的。
// 只有使用 CMS ,G1,Shenandoah 时,并且配置 -XX:+ExplicitGCInvokesConcurrent 的情况下
// 调用 System.gc() 会触发 Concurrent Full GC,java 线程在触发了 Concurrent Full GC 之后立马返回
System.gc();
try {
// 这里不是等待 gc 结束,而是等待 cleaner thread 运行 directBuffer 的 cleaner,在 cleaner 中释放 native memory
Thread.sleep(100);
} catch (InterruptedException y) {
Thread.currentThread().interrupt();
}
try {
// 重新进行内存映射
addr = map0(prot, mapPosition, mapSize, isSync);
} catch (OutOfMemoryError y) {
// After a second OOME, fail
throw new IOException("Map failed", y);
}
}
} // synchronized
// 检查 mmap 调用是否成功,失败的话错误信息会放在 addr 中
assert (IOStatus.checkAll(addr));
// addr 需要与文件页尺寸对齐
assert (addr % allocationGranularity == 0);
// Unmapper 用于调用 unmmap 释放映射出来的虚拟内存以及物理内存
// 并统计整个 JVM 进程调用 mmap 的总次数以及映射的内存总大小
// 本次 mmap 映射出来的内存区域信息都会封装在 Unmapper 中
Unmapper um = (isSync
? new SyncUnmapper(addr, mapSize, size, mfd, pagePosition)
: new DefaultUnmapper(addr, mapSize, size, mfd, pagePosition));
return um;
} finally {
// IO 操作完毕,从 threads 集合中删除当前线程
threads.remove(ti);
// IO 操作完毕,清空线程的中断回调函数,如果此时线程已被中断则抛出 closedByInterruptException 异常
endBlocking(IOStatus.checkAll(addr));
}
}
3. 与 MappedByteBuffer 相关的几个系统调用
从第一小节介绍的 mmap 在内核中的整个内存映射的过程我们可以看出,当调用 mmap 之后,OS 内核只是会为我们分配了一段虚拟内存(MappedByteBuffer),然后将虚拟内存与磁盘文件进行映射,仅此而已。
我们映射的文件内容此时还静静地躺在磁盘中还未加载进内存,映射文件的 page cache 还是空的,由于还未发生物理内存的分配,所以 MappedByteBuffer 在 JVM 进程页表中相关的页表项 pte 也是空的。
当我们开始访问这段 MappedByteBuffer 的时候,由于此时还没有物理内存与之映射,于是会产生一个缺页中断,随后 JVM 进程进入内核态,在内核缺页处理程序中分配物理内存页,然后将刚刚分配的物理内存页加入到映射文件的 page cache。
最后将映射的文件内容从磁盘中读取到这个物理内存页中并在页表中建立 MappedByteBuffer 与物理内存页的映射关系,后面我们在访问这段 MappedByteBuffer 的时候就是直接访问 page cache 了。
我们利用 MappedByteBuffer 去映射磁盘文件的目的其实就是为了通过 MappedByteBuffer 去直接访问磁盘文件的 page cache,不想切到内核态,也不想发生数据拷贝。
所以为了避免访问 MappedByteBuffer 可能带来的缺页中断产生的开销,我们通常会在调用 FileChannel#map 映射完磁盘文件之后,马上主动去触发一次缺页中断,目的就是先把 MappedByteBuffer 背后映射的文件内容预先加载到 page cache 中,并在 JVM 进程页表中建立好 page cache 中的物理内存与 MappedByteBuffer 的映射关系。
后续我们对 MappedByteBuffer 的访问速度就变得非常快了,上述针对 MappedByteBuffer 的预热过程,JDK 封装在 MappedByteBuffer#load 方法中:
public abstract class MappedByteBuffer extends ByteBuffer
{
public final MappedByteBuffer load() {
if (fd == null) {
return this;
}
try {
// 最终会调用到 MappedMemoryUtils#load 方法
SCOPED_MEMORY_ACCESS.load(scope(), address, isSync, capacity());
} finally {
Reference.reachabilityFence(this);
}
return this;
}
}
MappedByteBuffer 预热的核心逻辑主要分为两个步骤:首先 JDK 会调用一个 native 方法 load0 将 MappedByteBuffer 背后映射的文件内容先预读进 page cache 中。
private static native void load0(long address, long length);
// MappedMemoryUtils.c 文件
JNIEXPORT void JNICALL
Java_java_nio_MappedMemoryUtils_load0(JNIEnv *env, jobject obj, jlong address,
jlong len)
{
char *a = (char *)jlong_to_ptr(address);
int result = madvise((caddr_t)a, (size_t)len, MADV_WILLNEED);
if (result == -1) {
JNU_ThrowIOExceptionWithLastError(env, "madvise failed");
}
}
这里我们看到 load0 方法在 native 层面调用了一个叫做 madvise 的系统调用:
#include <sys/mman.h>
int madvise(caddr_t addr, size_t len, int advice);
madvise 在各大中间件中应用还是非常广泛的,应用程序可以通过该系统调用告知内核,接下来我们将会如何使用 [addr, addr + len] 这段范围的虚拟内存,内核后续会根据我们提供的 advice 做针对性的处理,用以提高应用程序的性能。
比如,我们可以通过 madvise 系统调用告诉内核接下来我们将顺序访问这段指定范围的虚拟内存,那么内核将会增大对映射文件的预读页数。如果我们是随机访问这段虚拟内存,内核将会禁止对映射文件的预读。
这里我们用到的 advice 选项为 MADV_WILLNEED ,该选项用来告诉内核我们将会马上访问这段虚拟内存,内核在收到这个建议之后,将会马上触发一次预读操作,尽可能将 MappedByteBuffer 背后映射的文件内容全部加载到 page cache 中。
但是 madvise 这里只是负责将 MappedByteBuffer 映射的文件内容加载到内存中(page cache),并不负责将 MappedByteBuffer(虚拟内存) 与 page cache 中的这些文件页(物理内存)进行关联映射,也就是说此时 MappedByteBuffer 在 JVM 进程页表中相关的页表项 PTE 还是空的。
所以 JDK 在调用完 load0 方法之后,还需要再次按照内存页的粒度对 MappedByteBuffer 进行访问,目的是触发缺页中断,在缺页中断处理中内核会将 MappedByteBuffer 与 page cache 通过进程页表关联映射起来。后续我们在对 MappedByteBuffer 进行访问就是直接访问 page cache 了,没有缺页中断也没有磁盘 IO 的开销。
关于 MappedByteBuffer 的 load 逻辑 , JDK 封装在 MappedMemoryUtils 类中:
class MappedMemoryUtils {
static void load(long address, boolean isSync, long size) {
// no need to load a sync mapped buffer
// isSync = true 表示 MappedByteBuffer 背后直接映射的是 non-volatile memory 而不是普通磁盘上的文件
// MappedBuffer 背后映射的内容已经在 non-volatile memory 中了不需要 load
if (isSync) {
return;
}
if ((address == 0) || (size == 0))
return;
// 返回 pagePosition
long offset = mappingOffset(address);
// MappedBuffer 实际映射的内存区域大小 也就是调用 mmap 时指定的 mapSize
long length = mappingLength(offset, size);
// mappingAddress 用于获取实际的映射起始位置 mapPosition
// madvise 也是按照内存页为粒度进行操作的,所以这里和 mmap 一样
// 需要对指定的 address 和 length 按照内存页的尺寸对齐
load0(mappingAddress(address, offset), length);
// 对 MappedByteBuffer 进行访问,触发缺页中断
// 目的是将 MappedByteBuffer 与 page cache 在进程页表中进行关联映射
Unsafe unsafe = Unsafe.getUnsafe();
// 获取内存页的尺寸,大小为 4K
int ps = Bits.pageSize();
// 计算 MappedByteBuffer 这片虚拟内存区域所包含的虚拟内存页个数
long count = Bits.pageCount(length);
// mmap 起始的映射地址,后面将基于这个地址挨个触发缺页中断
long a = mappingAddress(address, offset);
byte x = 0;
for (long i=0; i<count; i++) {
// 以内存页为粒度,挨个对 MappedByteBuffer 中包含的虚拟内存页触发缺页中断
x ^= unsafe.getByte(a);
a += ps;
}
if (unused != 0)
unused = x;
}
}
这里我们调用 load 方法的目的就是希望将 MappedByteBuffer 背后所映射的文件内容加载到物理内存中,在本文 《2.2 针对 persistent memory 的映射》 小节中,笔者介绍过,当我们调用 FileChannel#map 对文件进行内存映射的时候,如果参数 MapMode 设置了 READ_ONLY_SYNC 或者 READ_WRITE_SYNC 的话,那么这里的 isSync = true 。
表示 MappedByteBuffer 背后直接映射的是 non-volatile memory 而不是普通磁盘上的文件,映射内容已经在 non-volatile memory 中了,因此就不需要加载了,直接 return 掉。
non-volatile memory 也是需要 filesystem 来进行管理的,这些 filesystem 会通过 dax(direct access mode)进行挂载,从后面相关的 madvise 系统调用源码中我们也会看出,如果映射文件是 DAX 模式的,那么内核也会直接 return,不需要加载。
if (IS_DAX(file_inode(file))) {
return 0;
}
本文 《2.4.1 Unmapper 到底包装了哪些映射信息》小节中我们介绍过,通过 mmap 系统调用真实映射出来的虚拟内存范围与 MappedByteBuffer 所表示的虚拟内存范围是不一样的,MappedByteBuffer 只是其中的一个子集而已。
因为我们在 FileChannel#map 函数中指定的映射起始位置 position 是需要与文件页尺寸进行对齐的,这也就是说底层 mmap 系统调用必须要从文件页的起始位置处开始映射。
如果我们指定的 position 没有和文件页进行对齐,那么在 JDK 层面就需要找到 position 所在文件页的起始位置,也就是上图中的 mapPosition,mmap 将会从这里开始映射,映射出来的虚拟内存范围为 [mapPosition,mapPosition+mapSize]。最后 JDK 在从这段虚拟内存范围内划分出 MappedByteBuffer 所需要的范围,也就是我们在 FileChannel#map 参数中指定的 [position,position+size] 这段区域。
而 madvise 和 mmap 都是内核层面的系统调用,不管你 JDK 内部如何划分,它们只关注内核层面实际映射出来的虚拟内存,所以我们在调用 madvise 指定虚拟内存范围的时候需要与 mmap 真实映射出来的范围保持一致。
native 方法 load0 中的参数 address,其实就是 mmap 的起始映射地址 mapPosition,参数 length 其实就是 mmap 真实的映射长度 mapSize。
private static native void load0(long address, long length);
而 MappedMemoryUtils#load 方法中的参数 address 指的是 MappedByteBuffer 的起始地址也就是上面的 position,参数 size 指的是 MappedByteBuffer 的容量也就是我们指定的映射长度(并不是实际的映射长度)。
static void load(long address, boolean isSync, long size) {
所以在进入 load0 native 实现之前,需要做一些转换工作。首先通过 mappingOffset 根据 MappedByteBuffer 的起始地址 address 计算出 address 距离其所在文件页的起始地址的长度,也就是上图中的 pagePosition。该函数的计算逻辑比较简单且之前也已经介绍过了,这里不再赘述。
private static long mappingOffset(long address)
通过 mappingLength 计算出 mmap 底层实际映射出的虚拟内存大小 mapSize。
private static long mappingLength(long mappingOffset, long length) {
// mappingOffset 即为 pagePosition
// length 是之前指定的映射长度 size,也就是 MappedByteBuffer 的容量
return length + mappingOffset;
}
mappingAddress 用于获取 mmap 起始映射地址 mapPosition。
private static long mappingAddress(long address, long mappingOffset, long index) {
// address 为 MappedByteBuffer 的起始地址
// index 这里指定为 0
long indexAddress = address + index;
// mmap 映射的起始地址
return indexAddress - mappingOffset;
}
这样一来,我们通过 load0 方法进入 native 实现中调用 madvise 的时候,这里指定的参数 addr 就是上面 mappingAddress 方法返回的 mapPosition ,参数 len 就是 mappingLength 方法返回的 mapSize ,参数 advice 指定为 MADV_WILLNEED,立即触发一次预读。
#include <sys/mman.h>
int madvise(caddr_t addr, size_t len, int advice);
3.1 madvise
// 文件:/mm/madvise.c
SYSCALL_DEFINE3(madvise, unsigned long, start, size_t, len_in, int, behavior)
{
end = start + len;
vma = find_vma_prev(current->mm, start, &prev);
for (;;) {
/* Here vma->vm_start <= start < tmp <= (end|vma->vm_end). */
error = madvise_vma(vma, &prev, start, tmp, behavior);
}
out:
return error;
}
madvise 的作用其实就是在我们指定的虚拟内存范围 [start, end] 内包含的所有虚拟内存区域 vma 中依次根据我们指定的 behavior 触发 madvise_vma 执行相关的 behavior 处理逻辑。
find_vma_prev 的作用就是根据我们指定的映射起始地址 addr(start),在进程地址空间中查找出符合 addr < vma->vm_end 条件的第一个 vma 出来(下图中的蓝色部分)。
关于该函数的详细实现,感兴趣的读者可以回看下笔者之前的文章《从内核世界透视 mmap 内存映射的本质(源码实现篇)》
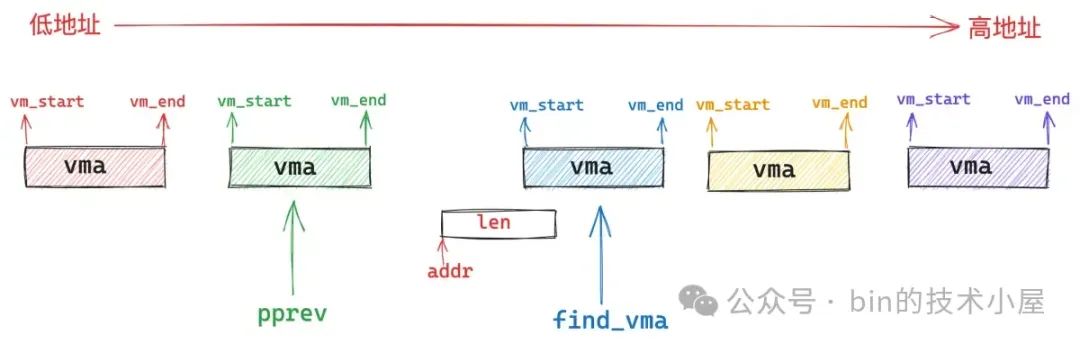
如果我们指定的起始虚拟内存地址 start 是一个无效的地址(未被映射),那么内核这里就会返回 ENOMEM 错误。
通过 find_vma_prev 查找出来的 vma 就是我们指定虚拟内存范围 [start, end] 内的第一个虚拟内存区域,后续内核会在一个 for 循环内从这个 vma 开始依次调用 madvise_vma,在指定虚拟内存范围内的所有 vma 中执行 behavior 相关的处理逻辑。
static long
madvise_vma(struct vm_area_struct *vma, struct vm_area_struct **prev,
unsigned long start, unsigned long end, int behavior)
{
switch (behavior) {
case MADV_WILLNEED:
return madvise_willneed(vma, prev, start, end);
}
}
其中 MADV_WILLNEED 的处理逻辑被内核封装在 madvise_willneed 方法中:
static long madvise_willneed(struct vm_area_struct *vma,
struct vm_area_struct **prev,
unsigned long start, unsigned long end)
{
// 获取映射文件
struct file *file = vma->vm_file;
// 映射内容在文件中的偏移
loff_t offset;
// 判断映射文件是否是 persistent memory filesystem 上的文件
if (IS_DAX(file_inode(file))) {
// 这里说明 mmap 映射的是 persistent memory 直接返回
return 0;
}
// madvise 底层其实调用的是 fadvise
vfs_fadvise(file, offset, end - start, POSIX_FADV_WILLNEED);
return 0;
}
从这里我们可以看出,如果映射文件是 persistent memory filesystem (通过 DAX 模式挂载)中的文件,那么表示这段虚拟内存背后直接映射的是 persistent memory ,madvise 系统调用直接就返回了。
这也解释了为什么 JDK 会在 MappedMemoryUtils#load 方法的一开始,就会判断如果 isSync = true 就直接返回,因为映射的文件内容已经存在于 persistent memory 中了,不需要再次加载了。
最终内核关于 advice 的处理逻辑封装在 vfs_fadvise 函数中,这里我们也可以看出 madvise 系统调用与 fadvise 系统调用本质上是一样的,最终都是通过这里的 vfs_fadvise 函数来处理。
// 文件:/mm/fadvise.c
int vfs_fadvise(struct file *file, loff_t offset, loff_t len, int advice)
{
return generic_fadvise(file, offset, len, advice);
}
int generic_fadvise(struct file *file, loff_t offset, loff_t len, int advice)
{
// 获取映射文件的 page cache
mapping = file->f_mapping;
switch (advice) {
case POSIX_FADV_WILLNEED:
// 将文件中范围为 [start_index, end_index] 的内容预读进 page cache 中
start_index = offset >> PAGE_SHIFT;
end_index = endbyte >> PAGE_SHIFT;
// 计算需要预读的内存页数
// 但内核不一定会按照 nrpages 指定的页数进行预读,还需要结合预读窗口来综合判断具体的预读页数
nrpages = end_index - start_index + 1;
// 强制进行预读,之后映射的文件内容就会加载进 page cache 中了
// 如果预读失败的话,这里会忽略掉错误,所以在应用层面是感知不到预读成功或者失败了的
force_page_cache_readahead(mapping, file, start_index, nrpages);
break;
}
return 0;
}
EXPORT_SYMBOL(generic_fadvise);
内核对于 MADV_WILLNEED 的处理其实就是通过 force_page_cache_readahead 立即触发一次预读,将之前通过 mmap 映射的文件内容全部预读进 page cache 中。
关于 force_page_cache_readahead 的详细内容,感兴趣的读者可以回看之前的文章 《从 Linux 内核角度探秘 JDK NIO 文件读写本质》
但这里需要注意的是预读可能会失败,内核这里会忽略掉预读失败的错误,我们在应用层面调用 madvise 的时候是感知不到预读失败的。
还有一点就是 madvise 中的 MADV_WILLNEED 只是将虚拟内存(MappedByteBuffer)背后映射的文件内容加载到 page cache 中。
当 madvise 系统调用返回的时候,虽然此时映射的文件内容已经在 page cache 中了,但是这些刚刚被加载进 page cache 的文件页还没有与 MappedByteBuffer 进行关联,也就是说 MappedByteBuffer 在 JVM 进程页表中对应的页表项 pte 仍然还是空的。
后续我们访问这段 MappedByteBuffer 的时候仍然会触发缺页中断,但是这种情况下的缺页中断是轻量的,属于 VM_FAULT_MINOR 类型的缺页,因为之前映射的文件内容已经通过 madvise 加载到 page cache 中了,这里只需要通过进程页表将 MappedByteBuffer 与 page cache 中的文件页关联映射起来就可以了,不需要重新分配内存以及发生磁盘 IO 。
所以这也是为什么在 MappedMemoryUtils#load 方法中,JDK 在调用完 native 方法 load0 之后,仍然需要以内存页为粒度再次访问一下 MappedByteBuffer 的原因,目的是通过缺页中断(VM_FAULT_MINOR)将 page cache 与 MappedByteBuffer 通过页表关联映射起来。
3.2 mlock
MappedByteBuffer 经过上面 MappedByteBuffer#load 函数的处理之后,现在 MappedByteBuffer 背后所映射的文件内容已经加载到 page cache 中了,并且在 JVM 进程页表中也已经建立好了 MappedByteBuffer 与 page cache 的映射关系。
从目前来看我们通过 MappedByteBuffer 就可以直接访问到 page cache 了,不需要经历缺页中断的开销。但 page cache 所占用的是物理内存,当系统中物理内存压力大的时候,内核仍然会将 page cache 中的文件页 swap out 出去。
这时如果我们再次访问 MappedByteBuffer 的时候,依然会发生缺页中断,当 MappedByteBuffer 被我们用来实现系统中的核心功能时,这就迫使我们要想办法让 MappedByteBuffer 背后映射的物理内存一直驻留在内存中,不允许内核 swap 。那么本小节要介绍的 mlock 系统调用就派上用场了。
#include <sys/mman.h>
int mlock(const void *addr, size_t len);
mlock 的主要作用是将 [addr, addr+len] 这段范围内的虚拟内存背后映射的物理内存锁定在内存中,当内存资源紧张的时候,这段物理内存将不会被 swap out 出去。
如果 [addr, addr+len] 这段虚拟内存背后还未映射物理内存,那么 mlock 也会立即在这段虚拟内存上主动触发缺页中断,为其分配物理内存,并在进程页表中建立映射关系。
// 文件:/mm/mlock.c
SYSCALL_DEFINE2(mlock, unsigned long, start, size_t, len)
{
return do_mlock(start, len, VM_LOCKED);
}
do_mlock 的核心主要分为两个步骤:
-
利用 apply_vma_lock_flags 函数在锁定范围内的虚拟内存区域内打上一个
VM_LOCKED标记,后续内核在 swap 的时候,如果遇到被VM_LOCKED标记的虚拟内存区域,那么它背后映射的物理内存将不会被 swap out 出去,而是会一直驻留在内存中。 -
如果指定锁定范围内的虚拟内存还未有物理内存与之映射,那么内核则调用 __mm_populate 主动为其填充物理内存,并在进程页表中建立虚拟内存与物理内存的映射关系,从本文的视角上来说,就是建立 MappedByteBuffer 与 page cache 的映射关系。
static __must_check int do_mlock(unsigned long start, size_t len, vm_flags_t flags)
{
// 本次需要锁定的内存页个数
unsigned long locked;
// 内核允许单个进程能够锁定的物理内存页个数
unsigned long lock_limit;
// 检查内核是否允许进行内存锁定
if (!can_do_mlock())
return -EPERM;
// 进程的相关资源限制配额定义在 task_struct->signal_struct->rlim 数组中
// rlimit(RLIMIT_MEMLOCK) 表示内核允许单个进程对物理内存锁定的限额,单位为字节
lock_limit = rlimit(RLIMIT_MEMLOCK);
// 转换为内存页个数
lock_limit >>= PAGE_SHIFT;
locked = len >> PAGE_SHIFT;
// mm->locked_vm 表示当前进程已经锁定的物理内存页个数
locked += current->mm->locked_vm;
// 如果需要锁定的内存资源没有超过内核的限制
// 并且内核允许进行内存锁定
if ((locked <= lock_limit) || capable(CAP_IPC_LOCK))
// 将 VM_LOCKED 标志设置到 [start, start + len] 这段虚拟内存范围内所有 vma 的属性 vm_flags 中
error = apply_vma_lock_flags(start, len, flags);
// 遍历 [start, start + len] 这段虚拟内存范围内所包含的所有虚拟内存页
// 依次在每个虚拟内存页上进行缺页处理,将其背后映射的文件内容读取到 page cache 中
// 并在进程页表中建立好虚拟内存到 page cache 的映射关系
error = __mm_populate(start, len, 0);
return 0;
}
一个进程能够允许锁定的内存资源在内核中是有限制的,内核对进程相关资源的限制配额保存在 task_struct->signal_struct->rlim 数组中:
struct task_struct {
struct signal_struct *signal;
}
struct signal_struct {
// 进程相关的资源限制,相关的资源限制以数组的形式组织在 rlim 中
// RLIMIT_MEMLOCK 下标对应的是进程能够锁定的内存资源,单位为bytes
struct rlimit rlim[RLIM_NLIMITS];
}
struct rlimit {
__kernel_ulong_t rlim_cur;
__kernel_ulong_t rlim_max;
};
我们可以通过修改 /etc/security/limits.conf 文件中的 memlock 相关配置项来调整能够被锁定的内存资源配额,设置为 unlimited 表示不对锁定内存进行限制。

进程能够锁定的物理内存资源配额通过 rlimit(RLIMIT_MEMLOCK) 来获取,单位为字节。
// 定义在文件:/include/linux/sched/signal.h
static inline unsigned long rlimit(unsigned int limit)
{
// 参数 limit 为相关资源的下标
return task_rlimit(current, limit);
}
static inline unsigned long task_rlimit(const struct task_struct *task,
unsigned int limit)
{
return READ_ONCE(task->signal->rlim[limit].rlim_cur);
}
内核在对内存进行锁定之前,需要通过 can_do_mlock 函数判断一下是否允许本次锁定操作:
-
rlimit(RLIMIT_MEMLOCK) != 0表示进程能够锁定的内存资源限额还没有用完,允许本次锁定操作。 -
如果锁定内存资源的限额已经用完,但是
capable(CAP_IPC_LOCK) = true表示当前进程拥有CAP_IPC_LOCK权限,那么即使在锁定资源配额用完的情况下,内核也是允许进程对内存资源进行锁定的。
bool can_do_mlock(void)
{
// 内核会限制能够被锁定的内存资源大小,单位为bytes
// 这里获取 RLIMIT_MEMLOCK 能够锁定的内存资源,如果为 0 ,则不能够锁定内存了。
if (rlimit(RLIMIT_MEMLOCK) != 0)
return true;
// 检查内核是否允许 mlock ,mlockall 等内存锁定操作
if (capable(CAP_IPC_LOCK))
return true;
return false;
}
如果当前进程已经锁定的内存资源没有超过内核的限制或者是当前进程拥有 CAP_IPC_LOCK 权限,那么内核就调用 apply_vma_lock_flags 将 [start, start + len] 这段虚拟内存范围内映射的物理内存锁定在内存中。
if ((locked <= lock_limit) || capable(CAP_IPC_LOCK))
error = apply_vma_lock_flags(start, len, flags);
内存锁定的逻辑其实非常简单,首先将 [start, start + len] 这段虚拟内存范围内的所有的虚拟内存区域 vma 查找出来,然后依次遍历这些 vma , 并将 VM_LOCKED 标志设置到 vma 的 vm_flags 标志位中。
struct vm_area_struct {
unsigned long vm_flags;
}
后续在物理内存资源紧张,内核开始 swap 的时候,当遇到 vm_flags 设置了 VM_LOCKED 的虚拟内存区域 vma 的时候,那么它背后映射的物理内存将不会被内核 swap out 出去。
从这里我们可以看出,所谓的内存锁定只不过是在指定锁定范围内的所有虚拟内存区域 vma 上打一个 VM_LOCKED 标记而已,但我们锁定的对象却是虚拟内存背后映射的物理内存。
所以接下来内核就会调用 __mm_populate 为 [start, start + len] 这段虚拟内存分配物理内存。内核这里首先还是将 [start, start + len] 这段虚拟内存范围内的所有 vma 查找出来,并立即依次为每个 vma 填充物理内存。
int __mm_populate(unsigned long start, unsigned long len, int ignore_errors)
{
end = start + len;
// 依次遍历进程地址空间中 [start , end] 这段虚拟内存范围的所有 vma
for (nstart = start; nstart < end; nstart = nend) {
........ 省略查找指定地址范围内 vma 的过程 ....
// 为 vma 分配物理内存
ret = populate_vma_page_range(vma, nstart, nend, &locked);
// 继续为下一个 vma (如果有的话)分配物理内存
nend = nstart + ret * PAGE_SIZE;
ret = 0;
}
return ret; /* 0 or negative error code */
}
populate_vma_page_range 负责计算单个 vma 中包含的虚拟内存页个数,然后调用 __get_user_pages 函数在每一个虚拟内存页上依次主动触发缺页中断处理。
long populate_vma_page_range(struct vm_area_struct *vma,
unsigned long start, unsigned long end, int *nonblocking)
{
// 获取进程地址空间
struct mm_struct *mm = vma->vm_mm;
// 计算 vma 中包含的虚拟内存页个数,后续会按照 nr_pages 分配物理内存
unsigned long nr_pages = (end - start) / PAGE_SIZE;
int gup_flags;
// 循环遍历 vma 中的每一个虚拟内存页,依次为其分配物理内存页
return __get_user_pages(current, mm, start, nr_pages, gup_flags,
NULL, NULL, nonblocking);
}
__get_user_pages 函数首先会通过 follow_page_mask 在进程页表中检查一下每一个虚拟内存页是否已经映射了物理内存,如果已经有物理内存了,那么这里就不用分配了,直接跳过。
如果虚拟内存页还没有映射物理内存,那么内核就会调用 faultin_page 立即触发一次缺页中断,在缺页中断的处理中,内核就会将该虚拟内存页(MappedByteBuffer)背后所映射的文件内容读取到 page cache 中,并在进程页表中建立 MappedByteBuffer 与 page cache 的映射关系。
关于缺页中断的处理细节,感兴趣的读者可以回看下《一文聊透 Linux 缺页异常的处理 —— 图解 Page Faults》
static long __get_user_pages(struct task_struct *tsk, struct mm_struct *mm,
unsigned long start, unsigned long nr_pages,
unsigned int gup_flags, struct page **pages,
struct vm_area_struct **vmas, int *nonblocking)
{
// 循环遍历 vma 中的每一个虚拟内存页
do {
struct page *page;
// 在进程页表中检查该虚拟内存页背后是否有物理内存页映射
page = follow_page_mask(vma, start, foll_flags, &ctx);
if (!page) {
// 如果虚拟内存页在页表中并没有物理内存页映射,那么这里调用 faultin_page
// 底层会调用到 handle_mm_fault 进入缺页处理流程 (write fault),分配物理内存,在页表中建立好映射关系
ret = faultin_page(tsk, vma, start, &foll_flags,
nonblocking);
} while (nr_pages);
return i ? i : ret;
}
到这里 mlock 系统调用就为大家介绍完了,接下来我们把上小节介绍的 madvise 系统调用与本小节的 mlock 放在一起对比一下,加深一下理解。
首先 madvise 系统调用中的 MADV_WILLNEED 作用很简单,当我们在 MappedByteBuffer 身上运用 madvise 之后,内核只是会将 MappedByteBuffer 背后所映射的文件内容加载到 page cache 中而已。
但 madvise 不会将 page cache 与 MappedByteBuffer 在进程页表中映射,后面进程在访问 MappedByteBuffer 的时候仍然会产生缺页中断,在缺页中断处理中才会与 page cache 在进程页表中进行映射关联。
当内存资源紧张的时候,page cache 中的文件页可能会被内核 swap out 出去,这时访问 MappedByteBuffer 还是会触发缺页中断。
当我们在 MappedByteBuffer 身上运用 mlock 之后,情况就不一样了,首先 mlock 系统调用也会将 MappedByteBuffer 背后所映射的文件内容加载到 page cache 中,除此之外,mlock 还会将 MappedByteBuffer 与 page cache 在进程页表中映射起来,更重要的一点是,mlock 会将 page cache 中缓存的相关文件页锁定在内存中。
3.3 msync
我们都知道 MappedByteBuffer 在刚被 FileChannel#map 映射出来的时候,它只是一片虚拟内存而已,映射文件的 page cache 是空的,进程页表中对应的页表项也都是空的。
后续我们通过访问 MappedByteBuffer 直接触发缺页中断也好,亦或者是通过前面介绍的两个系统调用 madvise , mlock 也罢,它们解决的问题是负责将 MappedByteBuffer 背后映射的文件内容加载到物理内存中(page cache),然后在进程页表中设置 MappedByteBuffer 与 page cache 的关联关系,以保证后续进程可以通过 MappedByteBuffer 直接访问 page cache。
但无论是通过 MappedByteBuffer 还是传统的 FileChannel#read or write ,它们在对文件进行读写的时候都是直接操作的 page cache。page cache 中被写入的文件页就会变成脏页,后续内核会根据自己的回写策略将脏页刷新到磁盘文件中。
但内核的回写策略是内核自己的行为,站在用户进程的角度来看属于被动回写,如果用户进程想要自己主动触发脏页的回写就需要用到一些相关的系统调用。
而负责脏页回写的系统调用有很多,比如:sync,fsync, fdatasync 以及本小节要介绍的 msync。其中 sync 主要负责回写整个系统内所有的脏页以及相关文件的 metadata。
而 fsync 和 fdatasync 主要是针对特定文件的脏页回写,其中 fsync 不仅会回写特定文件的脏页数据而且会回写文件的 metadata,fdatasync 就只会回写特定文件的脏页数据不会回写文件的 metadata。
FileChannel 中的 force 方法就是针对特定文件脏页的回写操作,参数 metaData 指定为 true 表示我们不仅需要对文件脏页内容进行回写还需要对文件的 metadata 进行回写,所以在 native 层调用的是 fsync。
参数 metaData 指定为 false 表示我们仅仅是需要回写文件的脏页内容,所以在 native 层调用的是 fdatasync 。
public class FileChannelImpl extends FileChannel
{
public void force(boolean metaData) throws IOException {
do {
// metaData = true 调用 fsync
// metaData = false 调用 fdatasync
rv = nd.force(fd, metaData);
} while ((rv == IOStatus.INTERRUPTED) && isOpen());
}
}
但 MappedByteBuffer 的回写却不是针对整个文件的,而是针对其所映射的文件区域进行回写,这就用到了 msync 系统调用。
#include <sys/mman.h>
int msync(void *addr, size_t len, int flags);
msync 主要针对 [addr, addr+ken] 这段虚拟内存范围内所映射的文件区域进行回写,但 msync 只会回写脏页数据并不会回写文件的 metadata。参数 flags 用于指定回写的方式,最常用的是 MS_SYNC ,它表示进程需要等到回写操作完成之后才会从该系统调用中返回。
除了 MS_SYNC 之外内核还提供了 MS_ASYNC,MS_INVALIDATE 这两个 flags 选项,但翻阅 msync 系统调用的源码你会发现,当我们设置了 MS_ASYNC 或者 MS_INVALIDATE 时,msync 不会做任何事情,相当于白白调用了一次。内核之所以会继续保留这两个选项,笔者这里猜测可能是为了兼容老版本内核关于脏页相关的处理逻辑,这里我们就不详细展开了。
MappedByteBuffer#force 方法用于对指定映射范围 [index,index+len] 内的文件内容进行回写:
public abstract class MappedByteBuffer extends ByteBuffer
{
public final MappedByteBuffer force(int index, int length) {
int capacity = capacity();
if ((address != 0) && (capacity != 0)) {
SCOPED_MEMORY_ACCESS.force(scope(), fd, address, isSync, index, length);
}
return this;
}
}
关于 MappedByteBuffer 的核心回写逻辑 JDK 封装在 MappedMemoryUtils 类中:
class MappedMemoryUtils {
static void force(FileDescriptor fd, long address, boolean isSync, long index, long length) {
if (isSync) {
// 如果 MappedByteBuffer 背后映射的是 persistent memory
// 那么在 force 回写数据的时候是通过 CPU 指令完成的而不是 msync 系统调用
Unsafe.getUnsafe().writebackMemory(address + index, length);
} else {
// force writeback via file descriptor
long offset = mappingOffset(address, index);
try {
force0(fd, mappingAddress(address, offset, index), mappingLength(offset, length));
} catch (IOException cause) {
throw new UncheckedIOException(cause);
}
}
}
private static native void force0(FileDescriptor fd, long address, long length) throws IOException;
}
如果 MappedByteBuffer 背后映射的是 persistent memory(isSync = true),那么这里的回写指的是将数据从 CPU 高速缓存 cache line 中刷新到 persistent memory 中。
不过这个刷新操作是通过 CLWK 指令(cache line writeback)将 cache line 中的数据 flush 到 persistent memory 中。不需要像传统磁盘文件那样需要启动块设备 IO 来回写磁盘。
如果 MappedByteBuffer 背后映射的是普通磁盘文件的话,JDK 这里就会调用一个 native 方法 force0 将映射文件区域的脏页回写到磁盘中,我们在 force0 的 native 实现中可以看到,JVM 这里调用了 msync。
msync 和 mmap 也是需要配对使用的,mmap 负责映射,msync 负责将映射出来的文件区域相关的脏页回写到磁盘中,所以我们在调用 msync 的时候,指定的虚拟内存范围需要和 mmap 真实映射出来的虚拟内存范围保持一致。
通过 mappingAddress 函数获取 mmap 真实的起始映射地址 mapPosition,通过 mappingLength 获取真实映射出来的区域大小 mapSize,将这两个值作为要进行回写的文件映射范围传入 msync 系统调用中。
// 文件:MappedMemoryUtils.c
JNIEXPORT void JNICALL
Java_java_nio_MappedMemoryUtils_force0(JNIEnv *env, jobject obj, jobject fdo,
jlong address, jlong len)
{
void* a = (void *)jlong_to_ptr(address);
int result = msync(a, (size_t)len, MS_SYNC);
if (result == -1) {
JNU_ThrowIOExceptionWithLastError(env, "msync failed");
}
}
下面我们来看一下当 JVM 调用 msync 之后,在内核中到底发生了什么:
首先如果我们指定的这段 [start , end] 虚拟内存地址是无效的,也就是还未被映射过,那么内核就会返回 ENOMEM 错误。
后面还是老套路,通过 find_vma 函数在进程地址空间中查找出 [start , end] 这段虚拟内存范围内第一个 vma 出来,然后在一个 for 循环中依次遍历指定范围内的所有 vma,并通过 vfs_fsync_range 将 vma 背后映射的文件区域内的脏页回写到磁盘中。
// 文件:/mm/msync.c
SYSCALL_DEFINE3(msync, unsigned long, start, size_t, len, int, flags)
{
unsigned long end;
struct mm_struct *mm = current->mm;
struct vm_area_struct *vma;
// [start,end] 这段虚拟内存范围内所映射的文件内容将会被回写到磁盘中
end = start + len;
// 在进程地址空间中查找第一个符合 start < vma->vm_end 的 vma 区域
vma = find_vma(mm, start);
// 遍历 [start,end] 区域内的所有 vma,依次回写脏页
for (;;) {
// 映射文件
struct file *file;
// MappedByteBuffer 映射的文件区域 [fstart,fend]
loff_t fstart, fend;
// 如果我们指定了一段无效的虚拟内存区域 [start,end],那么内核会返回 ENOMEM 错误
error = -ENOMEM;
if (!vma)
goto out_unlock;
/* Here start < vma->vm_end. */
if (start < vma->vm_start) {
start = vma->vm_start;
if (start >= end)
goto out_unlock;
unmapped_error = -ENOMEM;
}
file = vma->vm_file;
// 映射的文件内容在磁盘文件中的起始偏移
fstart = (start - vma->vm_start) +
((loff_t)vma->vm_pgoff << PAGE_SHIFT);
// 映射的文件内容在文件中的结束偏移
fend = fstart + (min(end, vma->vm_end) - start) - 1;
if ((flags & MS_SYNC) && file &&
(vma->vm_flags & VM_SHARED)) {
// 回写 [fstart,fend] 这段文件区域内的脏页到磁盘中
error = vfs_fsync_range(file, fstart, fend, 1);
}
}
out_unlock:
// 释放进程地址空间锁
up_read(&mm->mmap_sem);
out:
return error ? : unmapped_error;
}
vfs_fsync_range 函数最后一个参数 datasync 表示是否回写映射文件的 metadata,datasync = 0 表示文件的 metadata 以及脏页内容都需要回写。datasync = 1 表示只需要回写脏页内容。
这里我们看到 msync 系统调用将 datasync 设置为 1,只需要回写脏页内容即可。
int vfs_fsync_range(struct file *file, loff_t start, loff_t end, int datasync)
{
struct inode *inode = file->f_mapping->host;
// 映射文件所在的文件系统必须定义脏页回写函数 fsync
if (!file->f_op->fsync)
return -EINVAL;
if (!datasync && (inode->i_state & I_DIRTY_TIME))
// datasync = 0 表示不仅需要回写脏页数据而且还需要回写文件 metadata
mark_inode_dirty_sync(inode);
// 调用具体文件系统中实现的 fsync 函数,实现对指定文件区域内的脏页进行回写
return file->f_op->fsync(file, start, end, datasync);
}
EXPORT_SYMBOL(vfs_fsync_range);
msync 系统调用最终会调用到文件相关的操作函数 fsync,它和具体的文件系统相关,不同的文件系统有不同的实现,但最终回写脏页的时候都需要启动磁盘块设备 IO 对脏页进行回写。
4. 零拷贝
关于零拷贝这个话题,笔者原本不想再聊了,因为网上有太多讨论零拷贝的文章了,而且有些写的真挺不错的,可是大部分文章都在写 MappedByteBuffer 相较于传统 FileChannel 的优势,但好像很少有人来写一写 MappedByteBuffer 的劣势,所以笔者这里想写一点不一样的,来和大家讨论讨论 MappedByteBuffer 的劣势有哪些。
但在开始讨论这个话题之前,笔者想了想还是不能免俗,仍然需要把 MappedByteBuffer 和 FileChannel 放在一起从头到尾对比一下,基于这个思路,我们先来重新简要梳理一下 FileChannel 和 MappedByteBuffer 读写文件的流程。
在之前的文章《从 Linux 内核角度探秘 JDK NIO 文件读写本质》中,由于当时我们还未介绍 DirectByteBuffer 以及 MappedByteBuffer,所以笔者以 HeapByteBuffer 为例来介绍 FileChannel 读写文件的整个源码实现逻辑。
当我们使用 HeapByteBuffer 传入 FileChannel 的 read or write 方法对文件进行读写时,JDK 会首先创建一个临时的 DirectByteBuffer,对于 FileChannel#read 来说,JDK 在 native 层会将 read 系统调用从文件中读取的内容首先存放到这个临时的 DirectByteBuffer 中,然后在拷贝到 HeapByteBuffer 中返回。
对于 FileChannel#write 来说,JDK 会首先将 HeapByteBuffer 中的待写入数据拷贝到临时的 DirectByteBuffer 中,然后在 native 层通过 write 系统调用将 DirectByteBuffer 中的数据写入到文件的 page cache 中。
public class IOUtil {
static int read(FileDescriptor fd, ByteBuffer dst, long position,
NativeDispatcher nd)
throws IOException
{
// 如果我们传入的 dst 是 DirectBuffer,那么直接进行文件的读取
// 将文件内容读取到 dst 中
if (dst instanceof DirectBuffer)
return readIntoNativeBuffer(fd, dst, position, nd);
// 如果我们传入的 dst 是一个 HeapBuffer,那么这里就需要创建一个临时的 DirectBuffer
// 在调用 native 方法底层利用 read or write 系统调用进行文件读写的时候
// 传入的只能是 DirectBuffer
ByteBuffer bb = Util.getTemporaryDirectBuffer(dst.remaining());
try {
// 底层通过 read 系统调用将文件内容拷贝到临时 DirectBuffer 中
int n = readIntoNativeBuffer(fd, bb, position, nd);
if (n > 0)
// 将临时 DirectBuffer 中的文件内容在拷贝到 HeapBuffer 中返回
dst.put(bb);
return n;
}
}
static int write(FileDescriptor fd, ByteBuffer src, long position,
NativeDispatcher nd) throws IOException
{
// 如果传入的 src 是 DirectBuffer,那么直接将 DirectBuffer 中的内容拷贝到文件 page cache 中
if (src instanceof DirectBuffer)
return writeFromNativeBuffer(fd, src, position, nd);
// 如果传入的 src 是 HeapBuffer,那么这里需要首先创建一个临时的 DirectBuffer
ByteBuffer bb = Util.getTemporaryDirectBuffer(rem);
try {
// 首先将 HeapBuffer 中的待写入内容拷贝到临时的 DirectBuffer 中
// 随后通过 write 系统调用将临时 DirectBuffer 中的内容写入到文件 page cache 中
int n = writeFromNativeBuffer(fd, bb, position, nd);
return n;
}
}
}
当时有很多读者朋友给我留言提问说,为什么必须要在 DirectByteBuffer 中做一次中转,直接将 HeapByteBuffer 传给 native 层不行吗 ?
答案是肯定不行的,在本文开头笔者为大家介绍过 JVM 进程的虚拟内存空间布局,如下图所示:
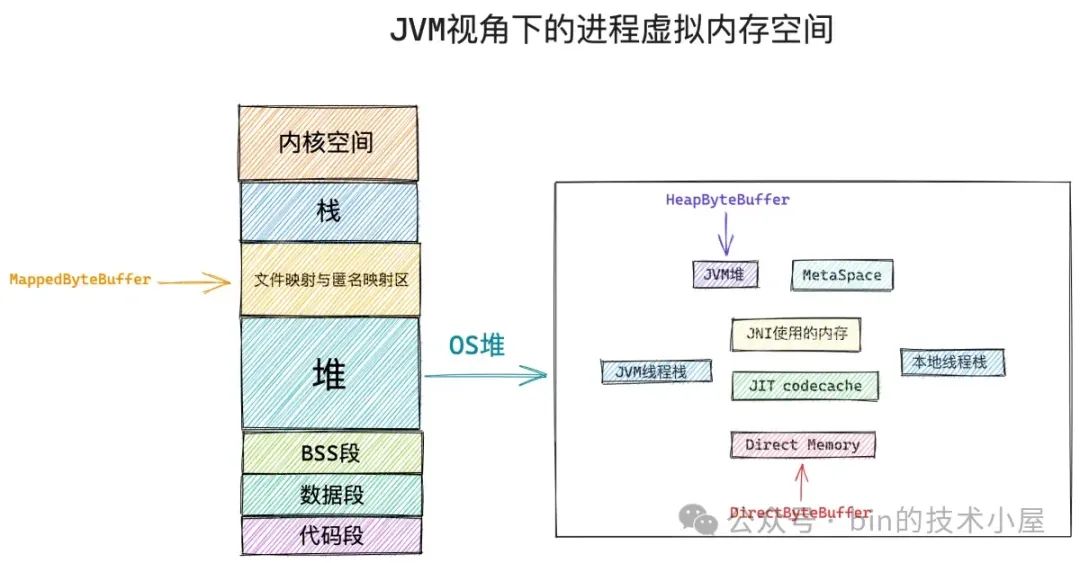
HeapByteBuffer 和 DirectByteBuffer 从本质上来说均是 JVM 进程地址空间内的一段虚拟内存,对于 Java 程序来说 HeapByteBuffer 被用来特定表示 JVM 堆中的内存,而 DirectByteBuffer 就是一个普通的 C++ 程序通过 malloc 系统调用向操作系统申请的一段 Native Memory 位于 JVM 堆之外。
既然 HeapByteBuffer 是位于 JVM 堆中的内存,那么它必然会受到 GC 的管理,当发生 GC 的时候,如果我们选择的垃圾回收器采用的是 Mark-Copy 或者 Mark-Compact 算法的时候(Mark-Swap 除外),GC 会来回移动存活的对象,这就导致了存活的 Java 对象比如这里的 HeapByteBuffer 在 GC 之后它背后的内存地址可能已经发生了变化。
而 JVM 中的这些 native 方法是处于 safepoint 之下的,执行 native 方法的线程由于是处于 safepoint 中,所以在执行 native 方法的过程中可能会有 GC 的发生。
如果我们把一个 HeapByteBuffer 传递给 native 层进行文件读写的时候不巧发生了 GC,那么 HeapByteBuffer 背后的内存地址就会变化,这样一来,如果我们在读取文件的话,内核将会把文件内容拷贝到另一个内存地址中。如果我们在写入文件的话,内核将会把另一个内存地址中的内存写入到文件的 page cache 中。
所以我们在通过 native 方法执行相关系统调用的时候必须要保证传入的内存地址是不会变化的,由于 DirectByteBuffer 背后所依赖的 Native Memory 位于 JVM 堆之外,是不会受到 GC 管理的,因此不管发不发生 GC,DirectByteBuffer 所引用的这些 Native Memory 地址是不会发生变化的。
所以我们在调用 native 方法进行文件读写的时候需要传入 DirectByteBuffer,如果我们用得是 HeapByteBuffer ,那么就需要一个临时的 DirectByteBuffer 作为中转。
这时可能有读者朋友又会问了,我们在使用 HeapByteBuffer 通过 FileChannel#write 对文件进行写入的时候,首先会将 HeapByteBuffer 中的内容拷贝到临时的 DirectByteBuffer 中,那如果在这个拷贝的过程中发生了 GC,HeapByteBuffer 背后引用内存的地址发生了变化,那么拷贝到 DirectByteBuffer 中的内容仍然是错的啊。
事实上在这个拷贝的过程中是不会发生 GC 的,因为 JVM 这里会使用 Unsafe#copyMemory 方法来实现 HeapByteBuffer 到 DirectByteBuffer 的拷贝操作,copyMemory 被 JVM 实现为一个 intrinsic 方法,中间是没有 safepoint 的,执行 copyMemory 的线程由于不在 safepoint 中,所以在拷贝的过程中是不会发生 GC 的。
public final class Unsafe {
// intrinsic 方法
public native void copyMemory(Object srcBase, long srcOffset,
Object destBase, long destOffset,
long bytes);
}
在交代完这个遗留的问题之后,下面我们就以 DirectByteBuffer 为例来重新简要回顾下传统 FileChannel 对文件的读写流程:
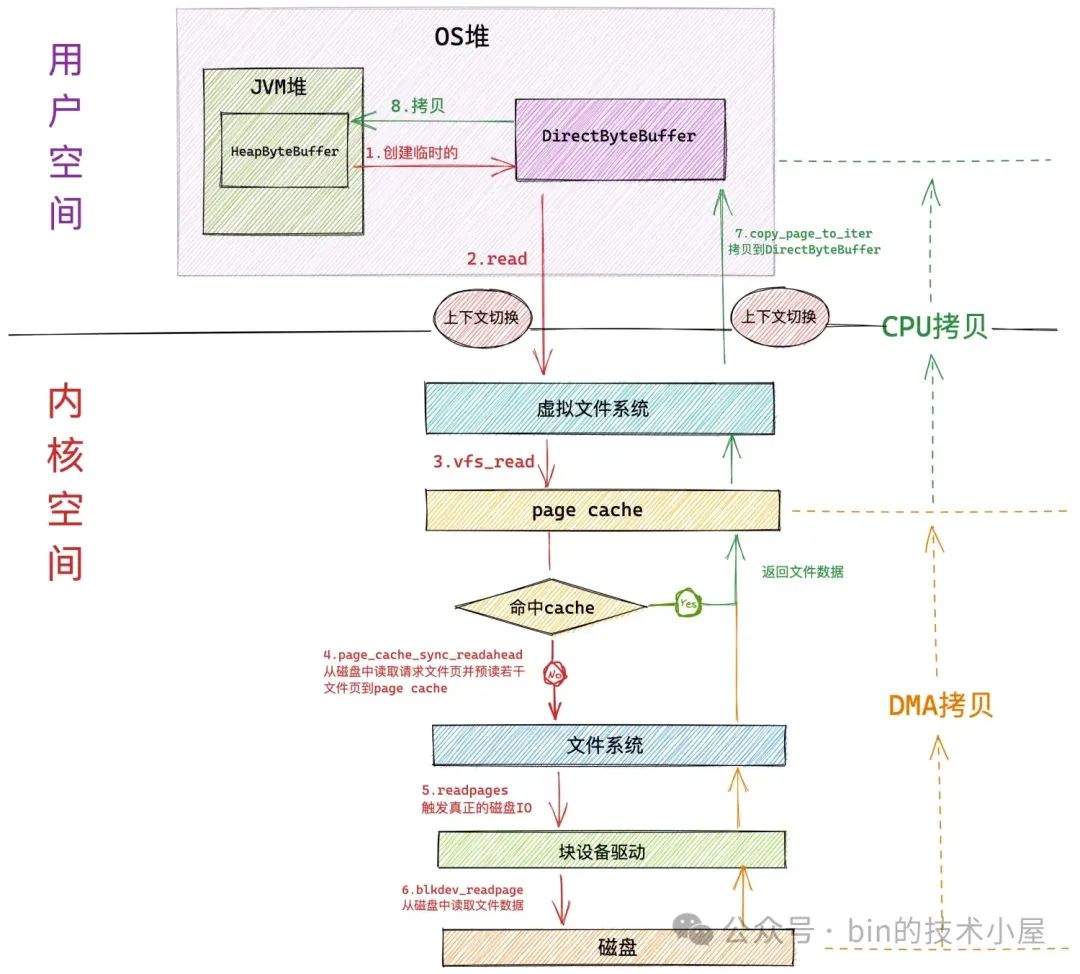
-
当 JVM 在 native 层使用 read 系统调用进行文件读取的时候,JVM 进程会发生第一次上下文切换,从用户态转为内核态。
-
随后 JVM 进程进入虚拟文件系统层,在这一层内核首先会查看读取文件对应的 page cache 中是否含有请求的文件数据,如果有,那么直接将文件数据拷贝到 DirectByteBuffer 中返回,避免一次磁盘 IO。并根据内核预读算法从磁盘中异步预读若干文件数据到 page cache 中
-
如果请求的文件数据不在 page cache 中,则会进入具体的文件系统层,在这一层内核会启动磁盘块设备驱动触发真正的磁盘 IO。并根据内核预读算法同步预读若干文件数据。请求的文件数据和预读的文件数据将被一起填充到 page cache 中。
-
磁盘控制器 DMA 将从磁盘中读取的数据拷贝到页高速缓存 page cache 中。发生第一次数据拷贝。
-
由于 page cache 是属于内核空间的,不能被 JVM 进程直接寻址,所以还需要 CPU 将 page cache 中的数据拷贝到位于用户空间的 DirectByteBuffer 中,发生第二次数据拷贝。
-
最后 JVM 进程从系统调用 read 中返回,并从内核态切换回用户态。发生第二次上下文切换。
从以上过程我们可以看到,当使用 FileChannel#read 对文件读取的时候,如果文件数据在 page cache 中,涉及到的性能开销点主要有两次上下文切换,以及一次 CPU 拷贝。其中上下文切换是主要的性能开销点。
下面是通过 FileChannel#write 写入文件的整个过程:
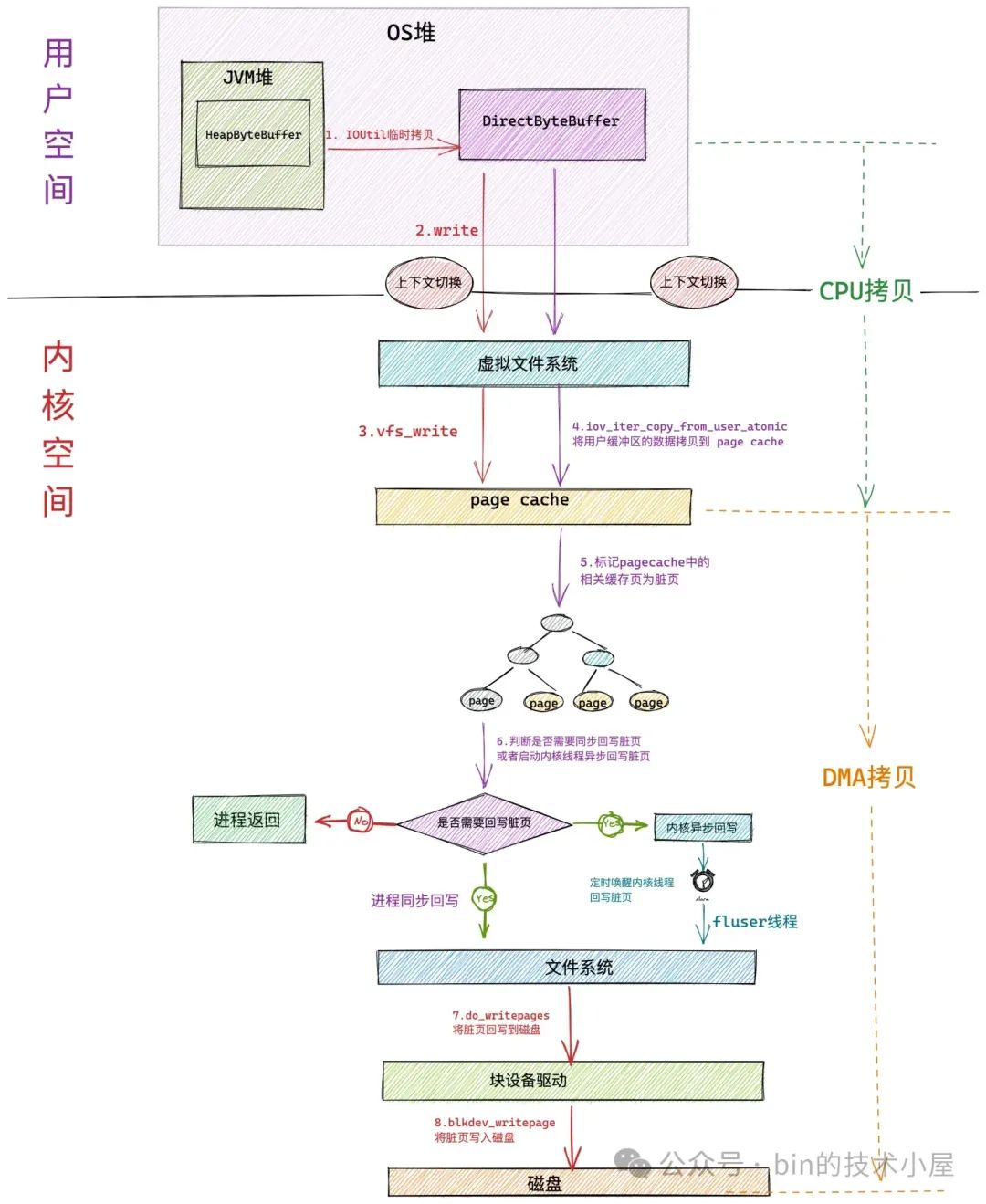
-
当 JVM 在 native 层使用 write 系统调用进行文件写入的时候,JVM 进程会发生第一次上下文切换,从用户态转为内核态。
-
进入内核态之后,JVM 进程在虚拟文件系统层调用 vfs_write 触发对 page cache 写入的操作。内核调用 iov_iter_copy_from_user_atomic 函数将 DirectByteBuffer 中的待写入数据拷贝到 page cache 中。发生第一次拷贝动作( CPU 拷贝)。
-
当待写入数据拷贝到 page cache 中时,内核会将对应的文件页标记为脏页,内核会根据一定的阈值判断是否要对 page cache 中的脏页进行回写,如果不需要同步回写,进程直接返回。这里发生第二次上下文切换。
-
脏页回写又会根据脏页数量在内存中的占比分为:进程同步回写和内核异步回写。当脏页太多了,进程自己都看不下去的时候,会同步回写内存中的脏页,直到回写完毕才会返回。在回写的过程中会发生第二次拷贝(DMA 拷贝)。
从以上过程我们可以看到,当使用 FileChannel#write 对文件写入的时候,如果不考虑脏页回写的情况,单纯对于 JVM 这个进程来说涉及到的性能开销点主要有两次上下文切换,以及一次 CPU 拷贝。其中上下文切换仍然是主要的性能开销点。
下面我们来看下通过 MappedByteBuffer 对文件进行读写的过程:
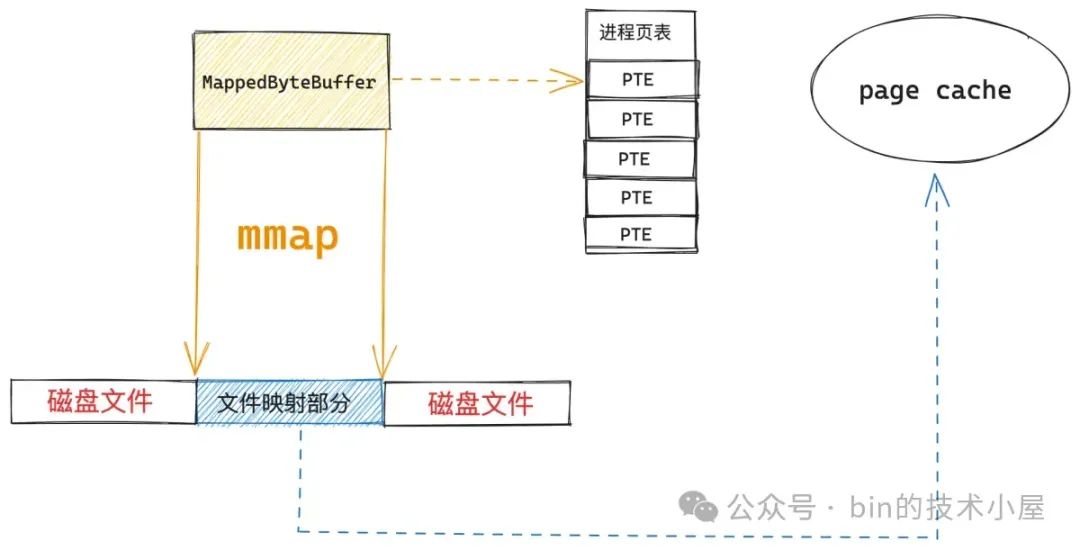
首先我们需要通过 FileChannel#map 将文件的某个区域映射到 JVM 进程的虚拟内存空间中,从而获得一段文件映射的虚拟内存区域 MappedByteBuffer。由于底层使用到了 mmap 系统调用,所以这个过程也涉及到了两次上下文切换。
如上图所示,当 MappedByteBuffer 在刚刚映射出来的时候,它只是进程地址空间中的一段虚拟内存,其对应在进程页表中的页表项还是空的,背后还没有映射物理内存。此时映射文件对应的 page cache 也是空的,我们要映射的文件内容此时还静静地躺在磁盘中。
当 JVM 进程开始对 MappedByteBuffer 进行读写的时候,就会触发缺页中断,内核会将映射的文件内容从磁盘中加载到 page cache 中,然后在进程页表中建立 MappedByteBuffer 与 page cache 的映射关系。由于这里涉及到了缺页中断的处理,因此也会有两次上下文切换的开销。
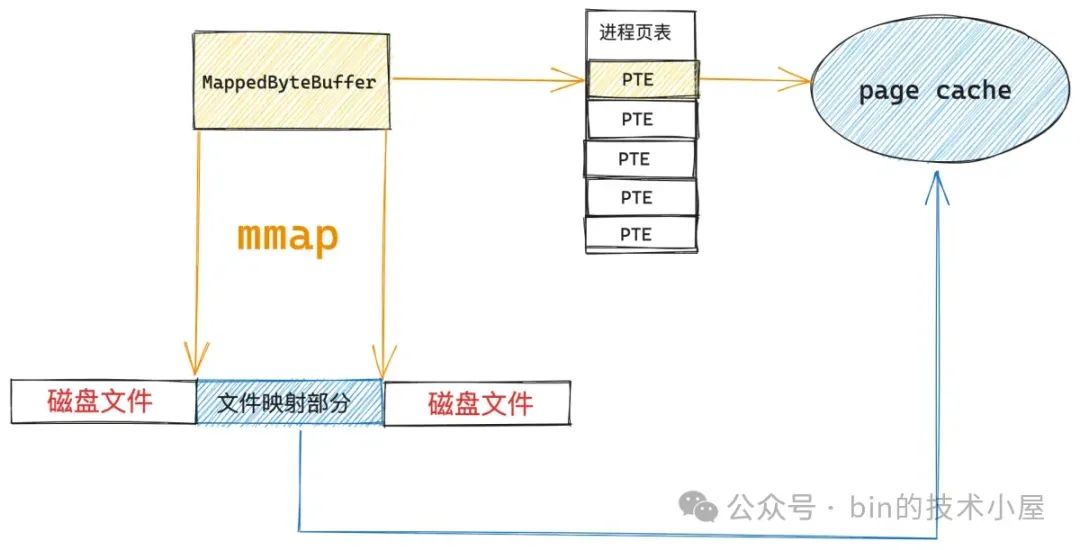
后面 JVM 进程对 MappedByteBuffer 的读写就相当于是直接读写 page cache 了,关于这一点,很多读者朋友会有这样的疑问:page cache 是内核态的部分,为什么我们通过用户态的 MappedByteBuffer 就可以直接访问内核态的东西了?
这里大家不要被内核态这三个字给唬住了,虽然 page cache 是属于内核部分的,但其本质上还是一块普通的物理内存,想想我们是怎么访问内存的 ? 不就是先有一段虚拟内存,然后在申请一段物理内存,最后通过进程页表将虚拟内存和物理内存映射起来么,进程在访问虚拟内存的时候,通过页表找到其映射的物理内存地址,然后直接通过物理内存地址访问物理内存。
回到我们讨论的内容中,这段虚拟内存不就是 MappedByteBuffer 吗,物理内存就是 page cache 啊,在通过页表映射起来之后,进程在通过 MappedByteBuffer 访问 page cache 的过程就和访问普通内存的过程是一模一样的。
也正因为 MappedByteBuffer 背后映射的物理内存是内核空间的 page cache,所以它不会消耗任何用户空间的物理内存(JVM 的堆外内存),因此也不会受到 -XX:MaxDirectMemorySize 参数的限制。
现在我们已经清楚了 FileChannel 以及 MappedByteBuffer 进行文件读写的整个过程,下面我们就来把两种文件读写方式放在一起来对比一下,但这里有一个对比的前提:
-
对于 MappedByteBuffer 来说,我们对比的是其在缺页处理之后,读写文件的开销。
-
对于 FileChannel 来说,我们对比的是文件数据已经存在于 page cache 中的情况下读写文件的开销。
因为笔者认为只有基于这个前提来对比两者的性能差异才有意义。
-
对于 FileChannel 来说,无论是通过 read 方法对文件的读取,还是通过 write 方法对文件的写入,它们都需要两次上下文切换,以及一次 CPU 拷贝,其中上下文切换是其主要的性能开销点。
-
对于 MappedByteBuffer 来说,由于其背后直接映射的就是 page cache,读写 MappedByteBuffer 本质上就是读写 page cache,整个读写过程和读写普通的内存没有任何区别,因此没有上下文切换的开销,不会切态,更没有任何拷贝。
从上面的对比我们可以看出使用 MappedByteBuffer 来读写文件既没有上下文切换的开销,也没有数据拷贝的开销(可忽略),简直是完爆 FileChannel。
既然 MappedByteBuffer 这么*,那我们何不干脆在所有文件的读写场景中全部使用 MappedByteBuffer,这样岂不省事 ?JDK 为何还保留了 FileChannel 的 read , write 方法呢 ?让我们来带着这个疑问继续下面的内容~~
5. MappedByteBuffer VS FileChannel
到现在为止,笔者已经带着大家完整的剖析了 mmap,read,write 这些系统调用在内核中的源码实现,并基于源码对 MappedByteBuffer 和 FileChannel 两者进行了性能开销上的对比。
虽然祭出了源码,但毕竟还是 talk is cheap,本小节我们就来对两者进行一次 Benchmark,来看一下 MappedByteBuffer 与 FileChannel 对文件读写的实际性能表现如何 ? 是否和我们从源码中分析的结果一致。
我们从两个方面来对比 MappedByteBuffer 和 FileChannel 的文件读写性能:
-
文件数据完全加载到 page cache 中,并且将 page cache 锁定在内存中,不允许 swap,MappedByteBuffer 不会有缺页中断,FileChannel 不会触发磁盘 IO 都是直接对 page cache 进行读写。
-
文件数据不在 page cache 中,我们加上了 缺页中断,磁盘IO,以及 swap 对文件读写的影响。
具体的测试思路是,用 MappedByteBuffer 和 FileChannel 分别以 64B ,128B ,512B ,1K ,2K ,4K ,8K ,32K ,64K ,1M ,32M ,64M ,512M 为单位依次对 1G 大小的文件进行读写,从以上两个方面对比两者在不同读写单位下的性能表现。
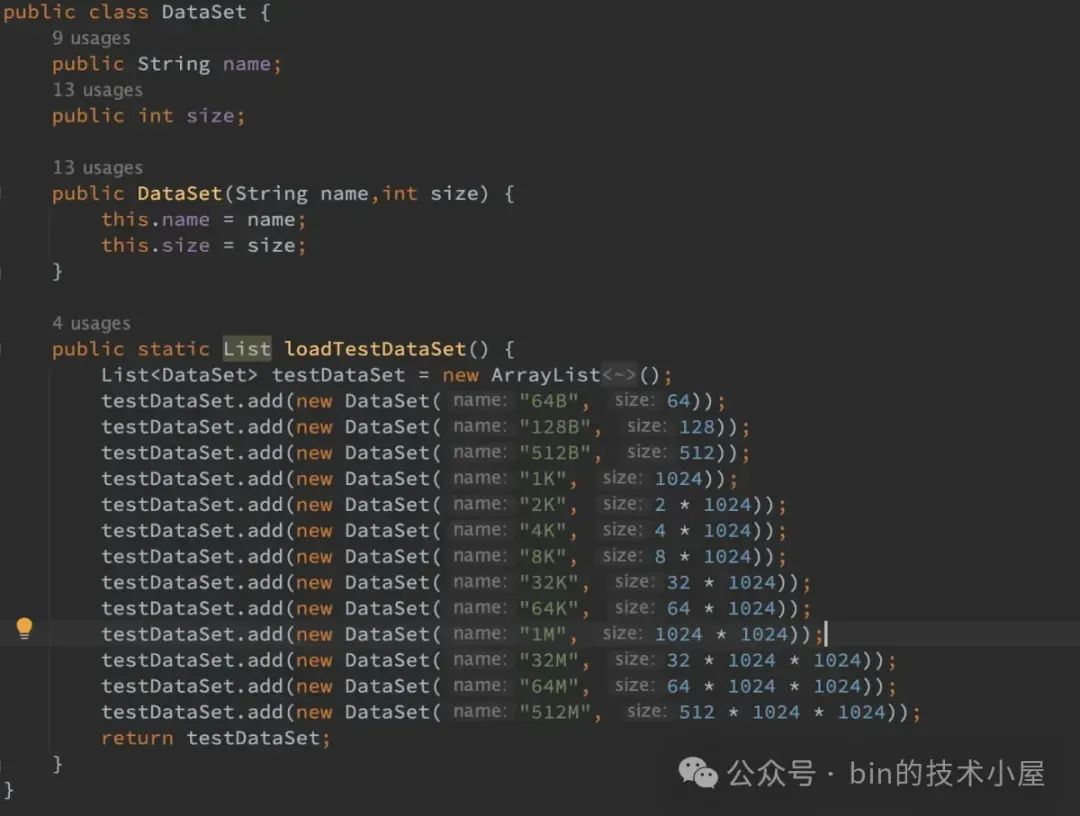
需要提醒大家的是本小节中得出的读写性能具体数值是没有参考价值的,因为不同软硬件环境下测试得出的具体性能数值都不一样,值得参考的是 MappedByteBuffer 和 FileChannel 在不同数据集大小下的读写性能趋势走向。笔者的软硬件测试环境如下:
-
处理器:2.5 GHz 四核Intel Core i7 -
内存:16 GB 1600 MHz DDR3 -
SSD:APPLE SSD SM0512F -
操作系统:macOS -
JVM:OpenJDK 17
测试代码:https://github.com/huibinliupush/benchmark , 大家也可以在自己的测试环境中运行一下,然后将跑出的结果提交到这个仓库中。这样方便大家在不同的测试环境下对比两者的文件读写性能差异 —— 众人拾柴火焰高。
5.1 文件数据在 page cache 中
由于这里我们要测试 MappedByteBuffer 和 FileChannel 直接对 page cache 的读写性能,所以笔者让 MappedByteBuffer ,FileChannel 只针对同一个文件进行读写测试。
在对文件进行读写之前,首先通过 mlock 系统调用将文件数据提前加载到 page cache 中并主动触发缺页处理,在进程页表中建立好 MappedByteBuffer 和 page cache 的映射关系。最后将 page cache 锁定在内存中不允许 swap。
下面是 MappedByteBuffer 和 FileChannel 在不同数据集下对 page cache 的读取性能测试:
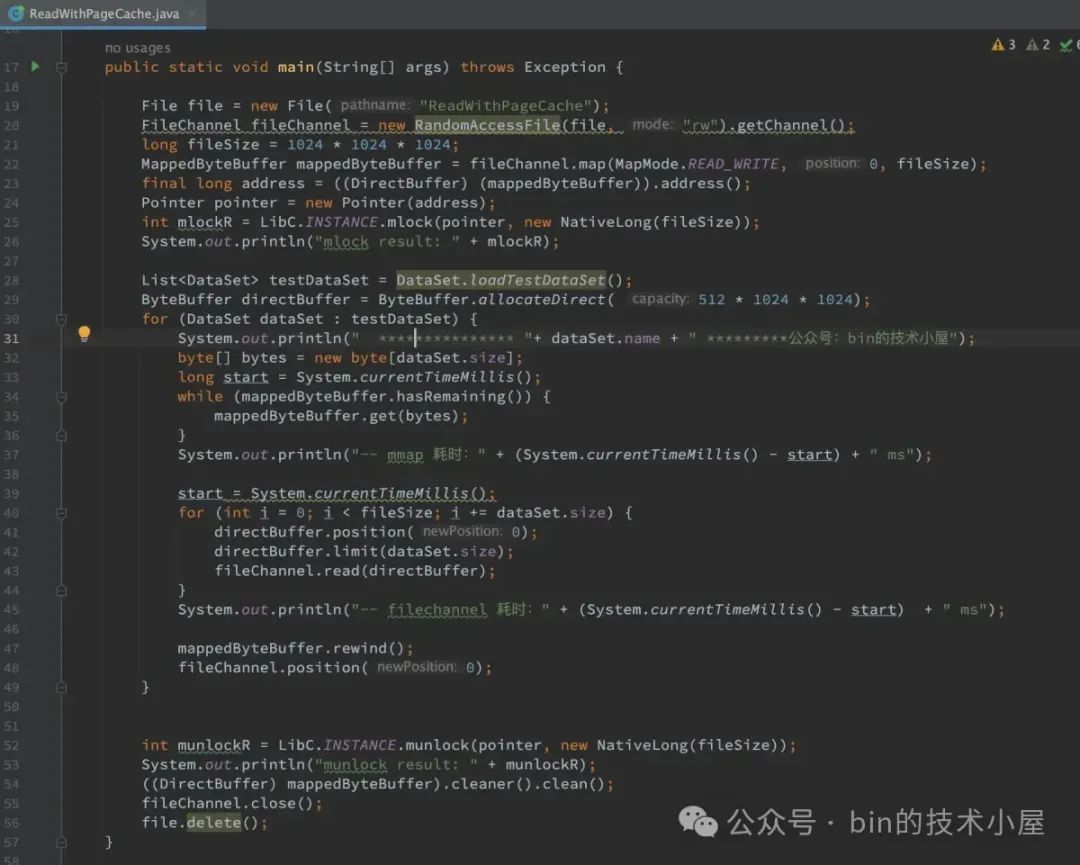
运行结果如下:
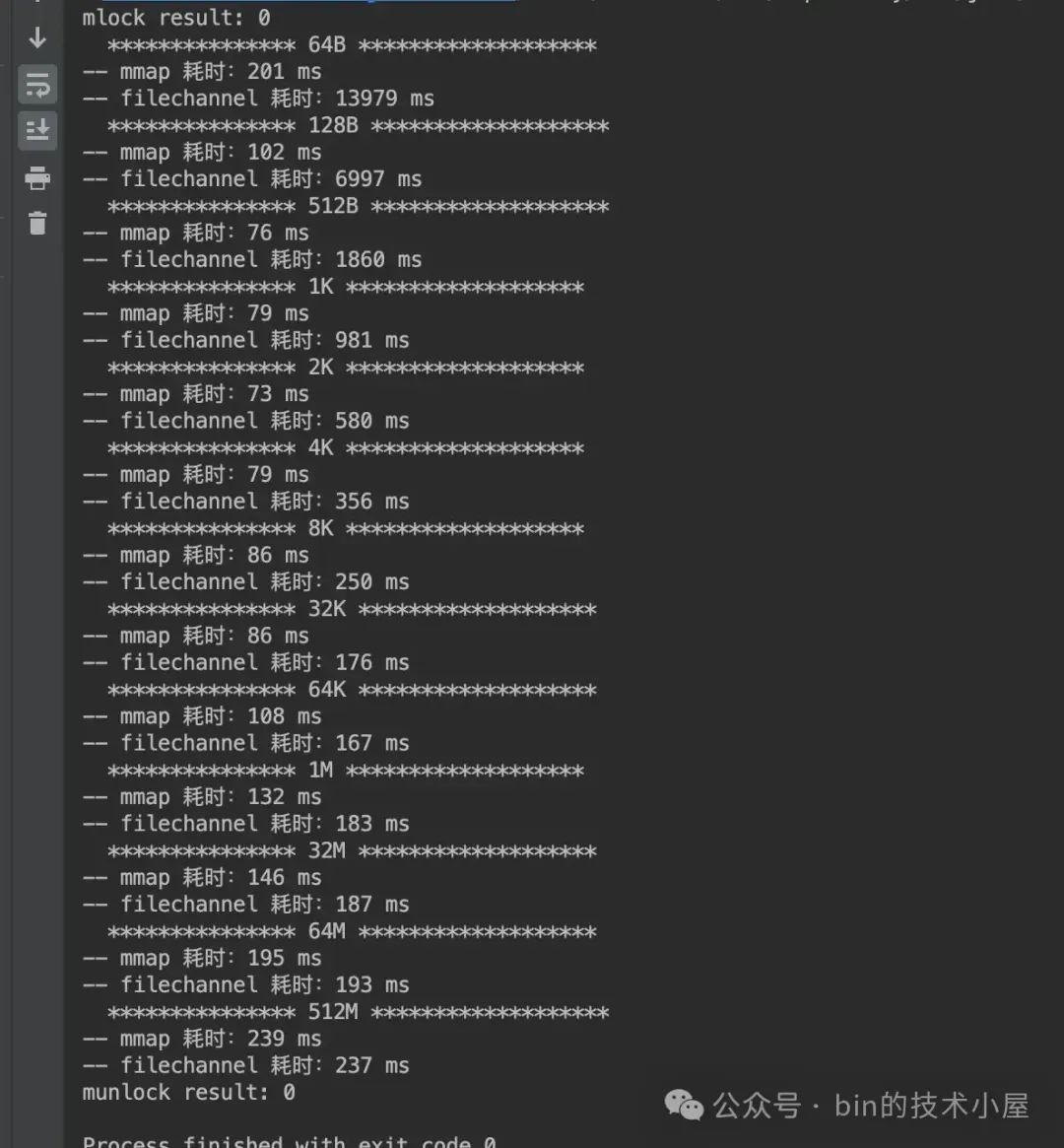
为了直观的让大家一眼看出 MappedByteBuffer 和 FileChannel 在对 page cache 读取的性能差异,笔者根据上面跑出的性能数据绘制成下面这幅柱状图,方便大家观察两者的性能趋势走向。
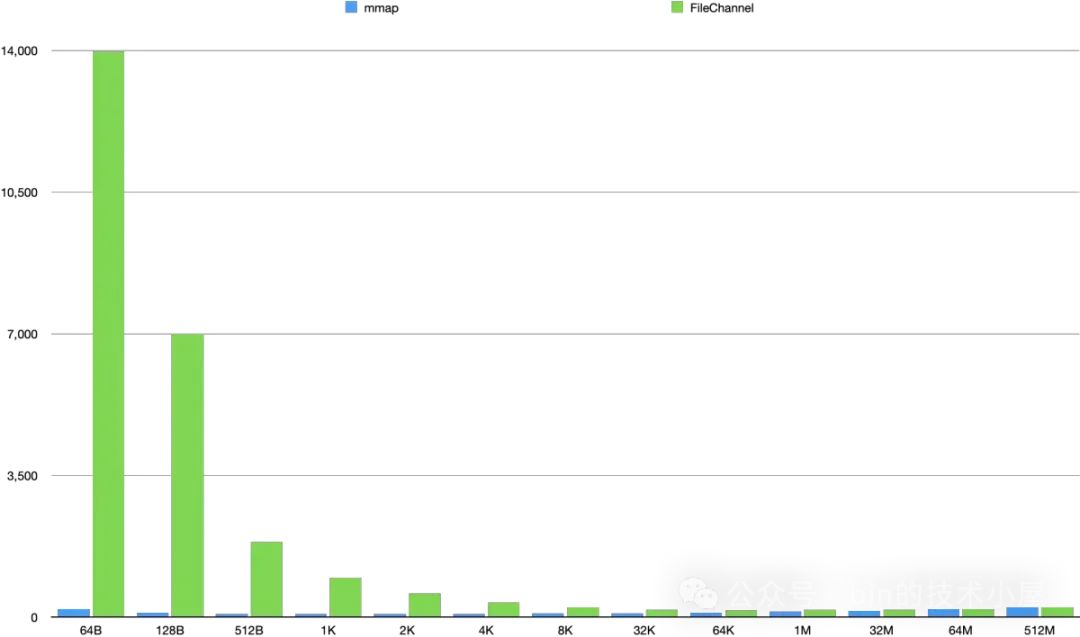
这里我们可以看出,MappedByteBuffer 在 4K 之前具有明显的压倒性优势,在 [8K , 32M] 这个区间内,MappedByteBuffer 依然具有优势但已经不是十分明显了,从 64M 开始 FileChannel 实现了一点点反超。
我们可以得到的性能趋势是,在 [64B, 2K] 这个单次读取数据量级范围内,MappedByteBuffer 读取的性能越来越快,并在 2K 这个数据量级下达到了性能最高值,仅消耗了 73 ms。从 4K 开始读取性能在一点一点的逐渐下降,并在 64M 这个数据量级下被 FileChannel 反超。
而 FileChannel 的读取性能会随着数据量的增大反而越来越好,并在某一个数据量级下性能会反超 MappedByteBuffer。FileChannel 的最佳读取性能点是在 64K 处,消耗了 167ms 。
因此 MappedByteBuffer 适合频繁读取小数据量的场景,具体多小,需要大家根据自己的环境进行测试,本小节我们得出的数据是 4K 以下。
FileChannel 适合大数据量的批量读取场景,具体多大,还是需要大家根据自己的环境进行测试,本小节我们得出的数据是 64M 以上。
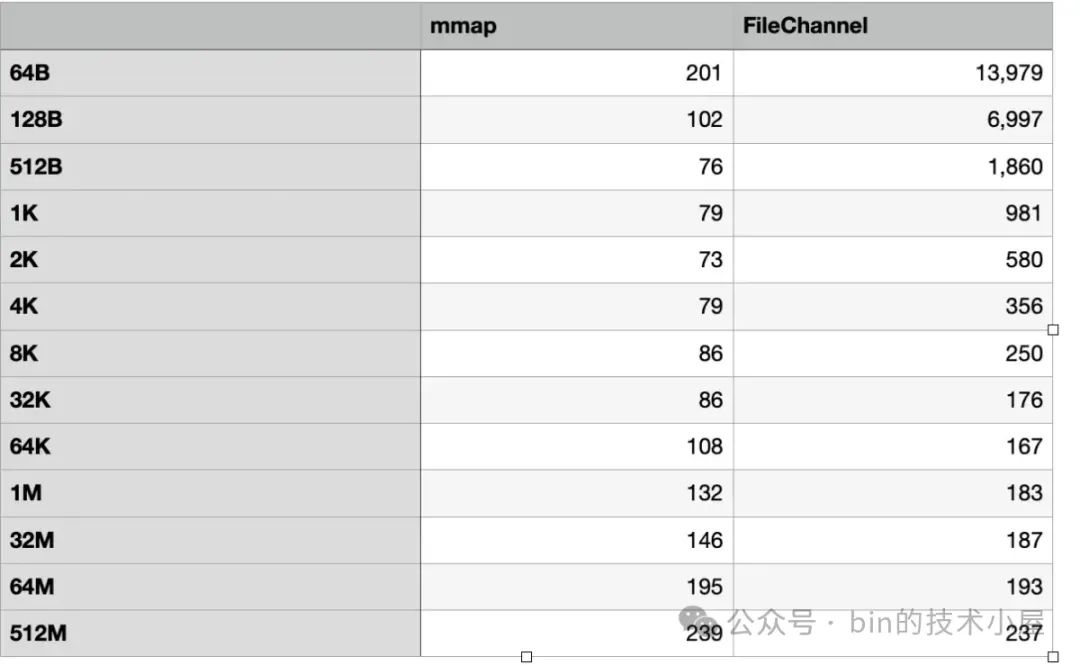
下面是 MappedByteBuffer 和 FileChannel 在不同数据集下对 page cache 的写入性能测试:
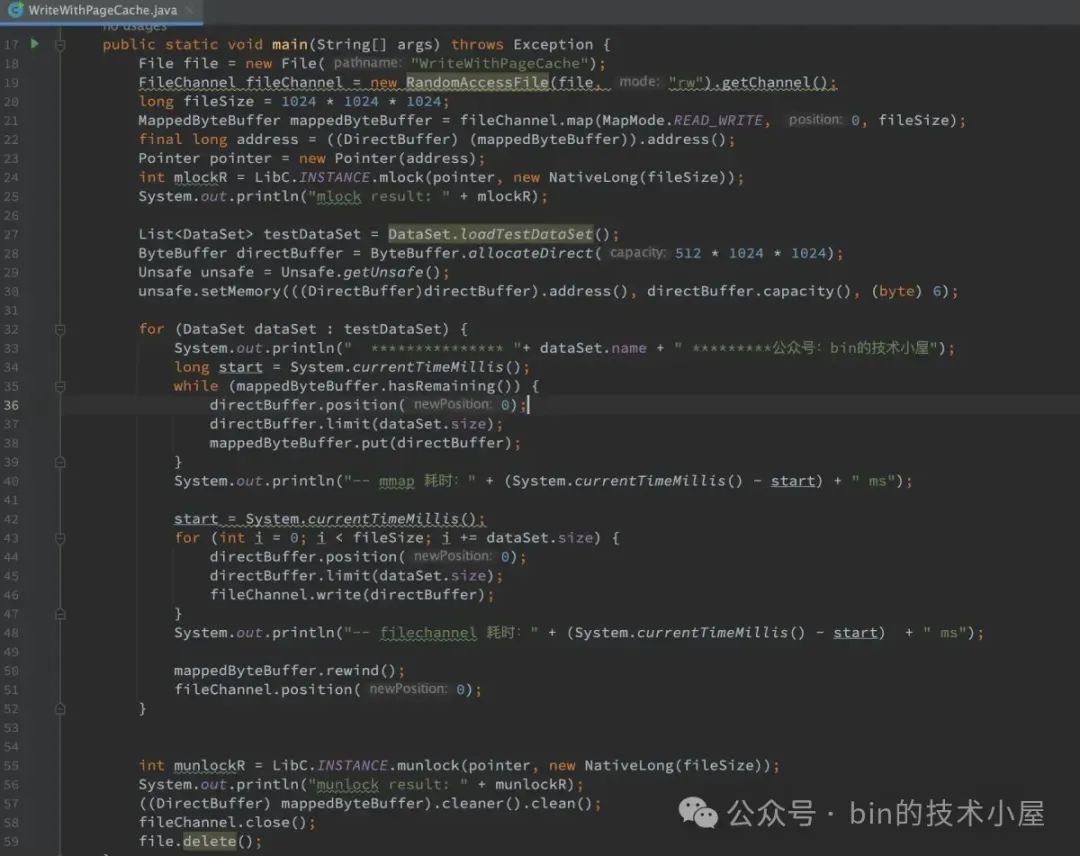
运行结果如下:
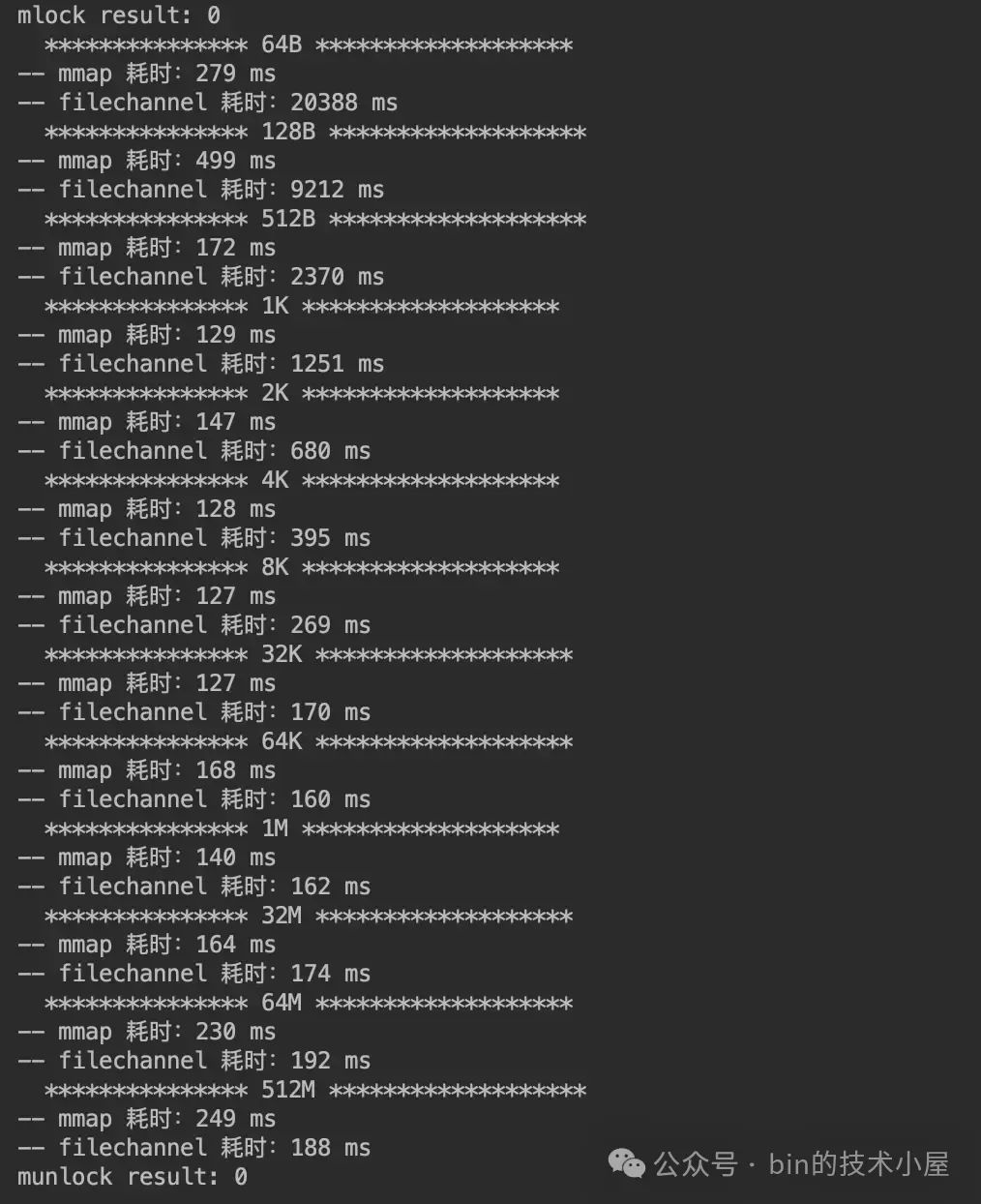
MappedByteBuffer 和 FileChannel 在不同数据集下对 page cache 的写入性能的趋势走向柱状图:
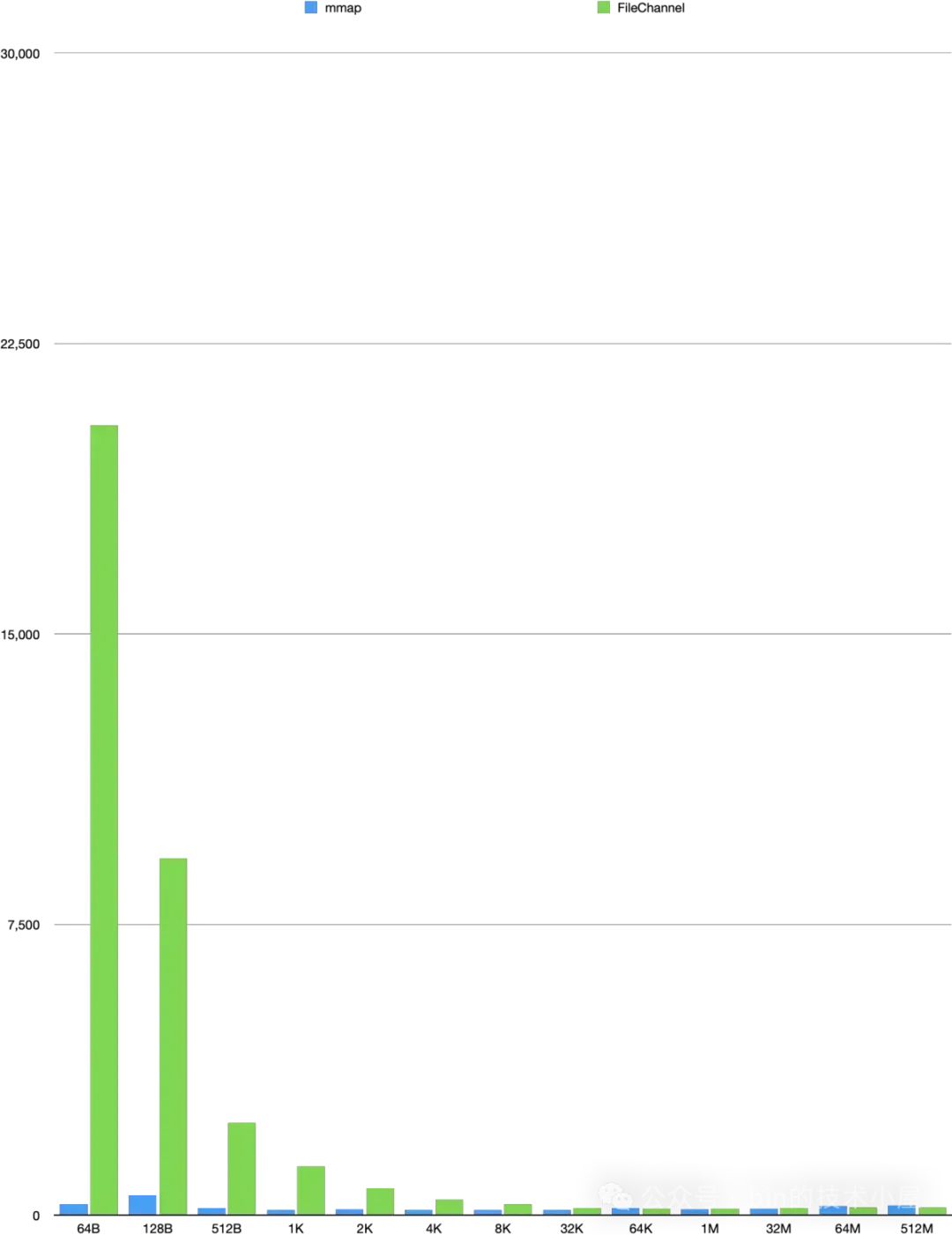
这里我们可以看到 MappedByteBuffer 在 8K 之前具有明显的写入优势,它的写入性能趋势是在 [64B , 8K] 这个数据集方位内,写入性能随着数据量的增大而越来越快,直到在 8K 这个数据集下达到了最佳写入性能。
而在 [32K, 32M] 这个数据集范围内,MappedByteBuffer 仍然具有优势,但已经不是十分明显了,最终在 64M 这个数据集下被 FileChannel 反超。
和前面的读取性能趋势一样,FileChannel 的写入性能也是随着数据量的增大反而越来越好,最佳的写入性能是在 64K 处,仅消耗了 160 ms 。
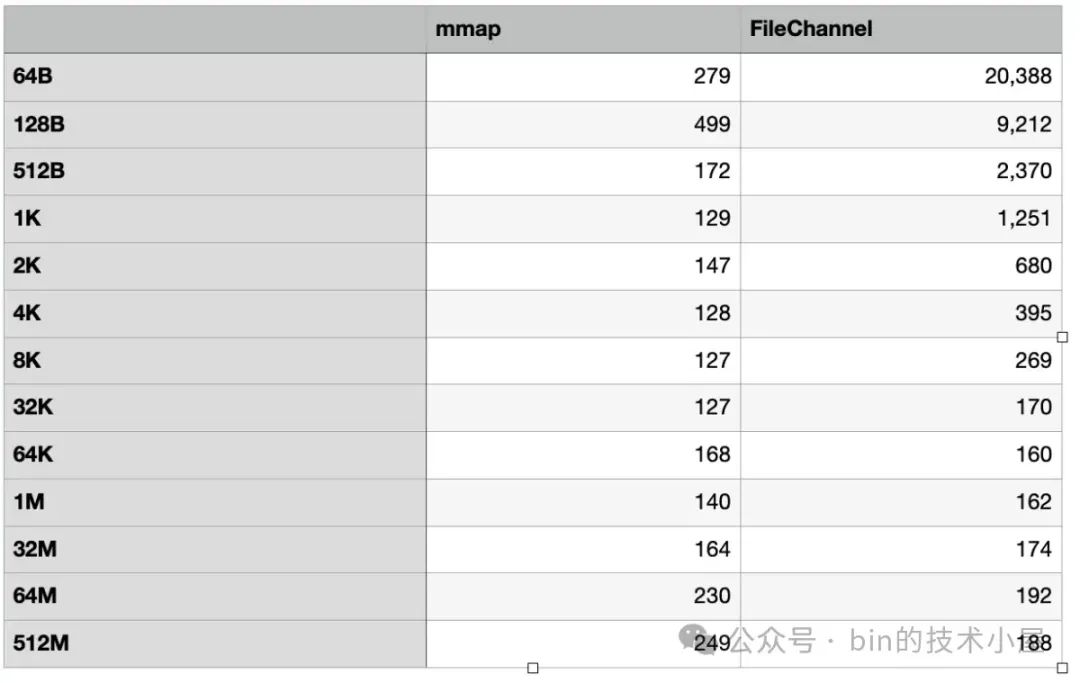
5.2 文件数据不在 page cache 中
在这一小节中,我们将缺页中断和磁盘 IO 的影响加入进来,不添加任何的优化手段纯粹地测一下 MappedByteBuffer 和 FileChannel 对文件读写的性能。
为了避免被 page cache 影响,所以我们需要在每一个测试数据集下,单独分别为 MappedByteBuffer 和 FileChannel 创建各自的测试文件。
下面是 MappedByteBuffer 和 FileChannel 在不同数据集下对文件的读取性能测试:
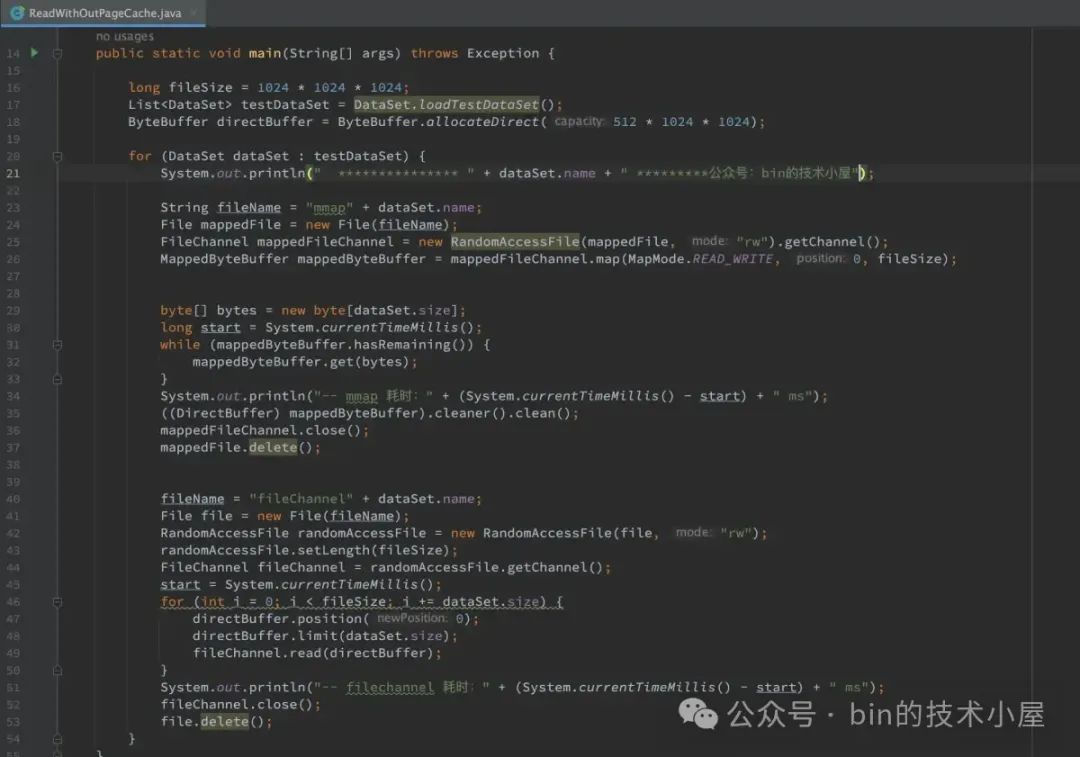
运行结果:
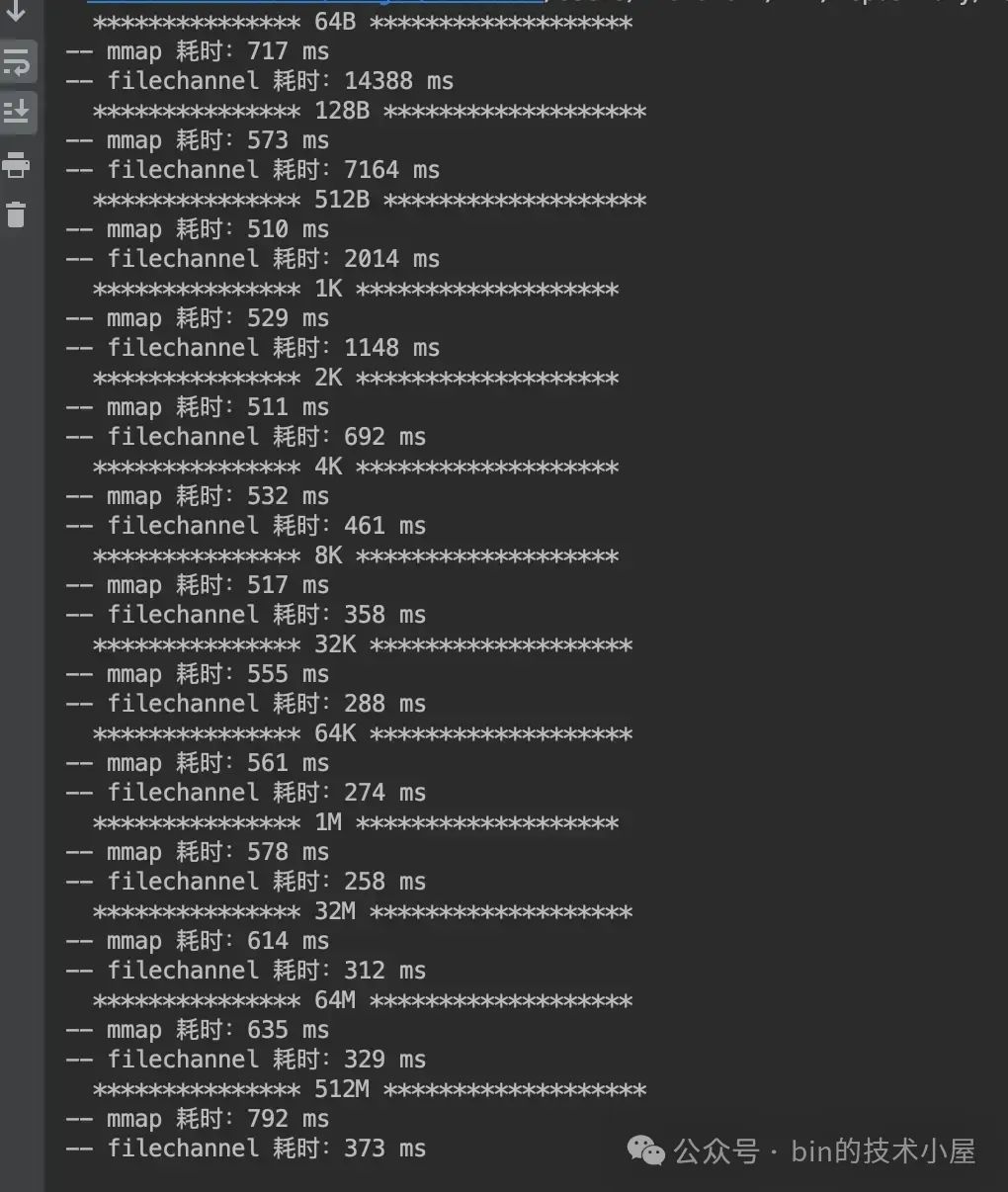
从这里我们可以看到,在加入了缺页中断和磁盘 IO 的影响之后,MappedByteBuffer 在缺页中断的影响下平均比之前多出了 500 ms 的开销。FileChannel 在磁盘 IO 的影响下在 [64B , 512B] 这个数据集范围内比之前平均多出了 1000 ms 的开销,在 [1K, 512M] 这个数据集范围内比之前平均多出了 100 ms 的开销。
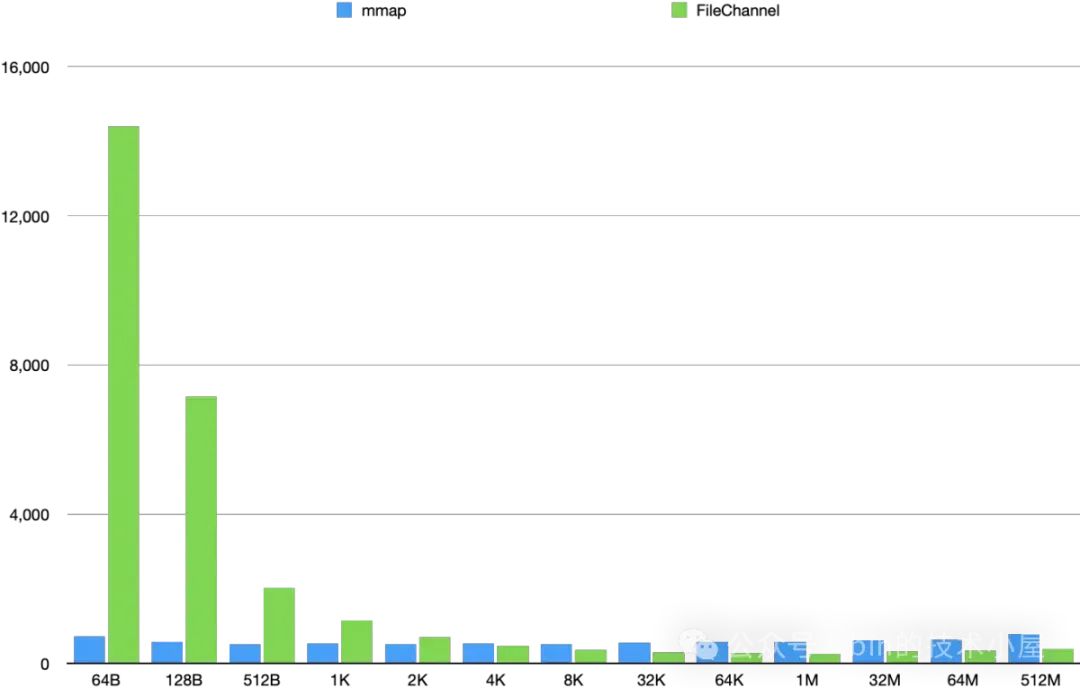
在 2K 之前, MappedByteBuffer 具有明显的读取性能优势,最佳的读取性能出现在 512B 这个数据集下,从 512B 往后,MappedByteBuffer 的读取性能趋势总体成下降趋势,并在 4K 这个地方被 FileChannel 反超。
FileChannel 则是在 [64B, 1M] 这个数据集范围内,读取性能会随着数据集的增大而提高,并在 1M 这个地方达到了 FileChannel 的最佳读取性能,仅消耗了 258 ms,在 [32M , 512M] 这个范围内 FileChannel 的读取性能在逐渐下降,但是比 MappedByteBuffer 的性能高出了一倍。
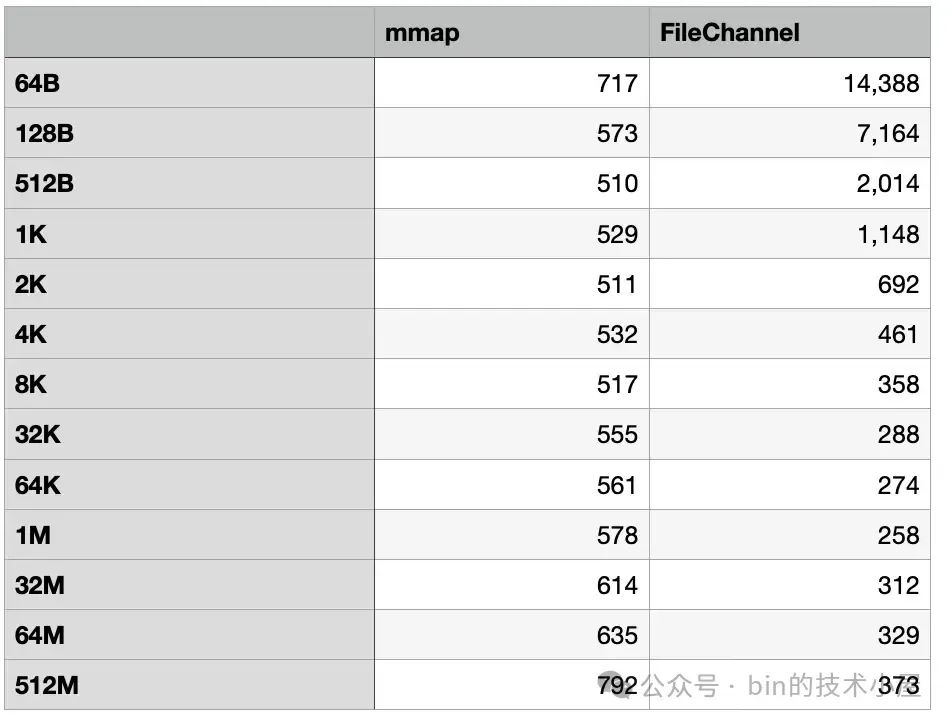
读到这里大家不禁要问了,理论上来讲 MappedByteBuffer 应该是完爆 FileChannel 才对啊,因为 MappedByteBuffer 没有系统调用的开销,为什么性能在后面反而被 FileChannel 超越了近一倍之多呢 ?
要明白这个问题,我们就需要分别把 MappedByteBuffer 和 FileChannel 在读写文件时候所涉及到的性能开销点一一列举出来,并对这些性能开销点进行详细对比,这样答案就有了。
首先 MappedByteBuffer 的主要性能开销是在缺页中断,而 FileChannel 的主要开销是在系统调用,两者都会涉及上下文的切换。
FileChannel 在读写文件的时候有磁盘IO,有预读。同样 MappedByteBuffer 的缺页中断也有磁盘IO 也有预读。目前来看他俩一比一打平。
但别忘了 MappedByteBuffer 是需要进程页表支持的,在实际访问内存的过程中会遇到页表竞争以及 TLB shootdown 等问题。还有就是 MappedByteBuffer 刚刚被映射出来的时候,其在进程页表中对应的各级页表以及页目录可能都是空的。所以缺页中断这里需要做的一件非常重要的事情就是补齐完善 MappedByteBuffer 在进程页表中对应的各级页目录表和页表,并在页表项中将 page cache 映射起来,最后还要刷新 TLB 等硬件缓存。
想更多了解缺页中断细节的读者可以看下之前的文章——《一文聊透 Linux 缺页异常的处理 —— 图解 Page Faults》
而 FileChannel 并不会涉及上面的这些开销,所以 MappedByteBuffer 的缺页中断要比 FileChannel 的系统调用开销要大,这一点我们可以在上小节和本小节的读写性能对比中看得出来。
文件数据在 page cache 中与不在 page cache 中,MappedByteBuffer 前后的读取性能平均差了 500 ms,而 FileChannel 前后却只平均差了 100 ms。
MappedByteBuffer 的缺页中断是平均每 4K 触发一次,而 FileChannel 的系统调用开销则是每次都会触发。当两者单次按照小数据量读取 1G 文件的时候,MappedByteBuffer 的缺页中断较少触发,而 FileChannel 的系统调用却在频繁触发,所以在这种情况下,FileChannel 的系统调用是主要的性能瓶颈。
这也就解释了当我们在频繁读写小数据量的时候,MappedByteBuffer 的性能具有压倒性优势。当单次读写的数据量越来越大的时候,FileChannel 调用的次数就会越来越少,这时候缺页中断就会成为 MappedByteBuffer 的性能瓶颈,到某一个点之后,FileChannel 就会反超 MappedByteBuffer。因此当我们需要高吞吐量读写文件的时候 FileChannel 反而是最合适的。
除此之外,内核的脏页回写也会对 MappedByteBuffer 以及 FileChannel 的文件写入性能有非常大的影响,无论是我们在用户态中调用 fsync 或者 msync 主动触发脏页回写还是内核通过 pdflush 线程异步脏页回写,当我们使用 MappedByteBuffer 或者 FileChannel 写入 page cache 的时候,如果恰巧遇到文件页的回写,那么写入操作都会有非常大的延迟,这个在 MappedByteBuffer 身上体现的更为明显。
为什么这么说呢 ? 我们还是到内核源码中去探寻原因,先来看脏页回写对 FileChannel 的写入影响。下面是 FileChannel 文件写入在内核中的核心实现:
ssize_t generic_perform_write(struct file *file,
struct iov_iter *i, loff_t pos)
{
// 从 page cache 中获取要写入的文件页并准备记录文件元数据日志工作
status = a_ops->write_begin(file, mapping, pos, bytes, flags,
&page, &fsdata);
// 将用户空间缓冲区 DirectByteBuffer 中的数据拷贝到 page cache 中的文件页中
copied = iov_iter_copy_from_user_atomic(page, i, offset, bytes);
// 将写入的文件页标记为脏页并完成文件元数据日志的写入
status = a_ops->write_end(file, mapping, pos, bytes, copied,
page, fsdata);
// 判断是否需要同步回写脏页
balance_dirty_pages_ratelimited(mapping);
}
首先内核会在 write_begin 函数中通过 grab_cache_page_write_begin 从文件 page cache 中获取要写入的文件页。
struct page *grab_cache_page_write_begin(struct address_space *mapping,
pgoff_t index, unsigned flags)
{
struct page *page;
// 在 page cache 中查找写入数据的缓存页
page = pagecache_get_page(mapping, index, fgp_flags,
mapping_gfp_mask(mapping));
if (page)
wait_for_stable_page(page);
return page;
}
在这里会调用一个非常重要的函数 wait_for_stable_page,这个函数的作用就是判断当前 page cache 中的这个文件页是否正在被回写,如果正在回写到磁盘,那么当前进程就会阻塞直到脏页回写完毕。
/**
* wait_for_stable_page() - wait for writeback to finish, if necessary.
* @page: The page to wait on.
*
* This function determines if the given page is related to a backing device
* that requires page contents to be held stable during writeback. If so, then
* it will wait for any pending writeback to complete.
*/
void wait_for_stable_page(struct page *page)
{
if (bdi_cap_stable_pages_required(inode_to_bdi(page->mapping->host)))
wait_on_page_writeback(page);
}
EXPORT_SYMBOL_GPL(wait_for_stable_page);
等到脏页回写完毕之后,进程才会调用 iov_iter_copy_from_user_atomic 将待写入数据拷贝到 page cache 中,最后在 write_end 中调用 mark_buffer_dirty 将写入的文件页标记为脏页。
除了正在回写的脏页会阻塞 FileChannel 的写入过程之外,如果此时系统中的脏页太多了,超过了 dirty_ratio 或者 dirty_bytes 等内核参数配置的脏页比例,那么进程就会同步去回写脏页,这也对写入性能有非常大的影响。
我们接着再来看脏页回写对 MappedByteBuffer 的写入影响,在开始分析之前,笔者先问大家一个问题:通过 MappedByteBuffer 写入 page cache 之后,page cache 中的相应文件页是怎么变脏的 ?
FileChannel 很好理解,因为 FileChannel 走的是系统调用,会进入到文件系统由内核进行处理,如果写入文件页恰好正在回写时,内核会调用 wait_for_stable_page 阻塞当前进程。在将数据写入文件页之后,内核又会调用 mark_buffer_dirty 将页面变脏。
MappedByteBuffer 就很难理解了,因为 MappedByteBuffer 不会走系统调用,直接读写的就是 page cache,而 page cache 也只是内核在软件层面上的定义,它的本质还是物理内存。另外脏页以及脏页的回写都是内核在软件层面上定义的概念和行为。
MappedByteBuffer 直接写入的是硬件层面的物理内存(page cache),硬件哪管你软件上定义的脏页以及脏页回写啊,没有内核的参与,那么在通过 MappedByteBuffer 写入文件页之后,文件页是如何变脏的呢 ?还有就是 MappedByteBuffer 如何探测到对应文件页正在回写并阻塞等待呢 ?
既然我们涉及到了软件的概念和行为,那么一定就会有内核的参与,我们回想一下整个 MappedByteBuffer 的生命周期,唯一一次和内核打交道的机会就是缺页中断,我们看看能不能在缺页中断中发现点什么~
当 MappedByteBuffer 刚刚被 mmap 映射出来的时候它还只是一段普通的虚拟内存,背后什么都没有,其在进程页表中的各级页目录项以及页表项都还是空的。
当我们立即对 MappedByteBuffer 进行写入的时候就会发生缺页中断,在缺页中断的处理中,内核会在进程页表中补齐与 MappedByteBuffer 映射相关的各级页目录并在页表项中与 page cache 进行映射。
static vm_fault_t do_shared_fault(struct vm_fault *vmf)
{
// 从 page cache 中读取文件页
ret = __do_fault(vmf);
if (vma->vm_ops->page_mkwrite) {
unlock_page(vmf->page);
// 将文件页变为可写状态,并设置文件页为脏页
// 如果文件页正在回写,那么阻塞等待
tmp = do_page_mkwrite(vmf);
}
}
除此之外,内核还会调用 do_page_mkwrite 方法将 MappedByteBuffer 对应的页表项变成可写状态,并将与其映射的文件页立即设置位脏页,如果此时文件页正在回写,那么 MappedByteBuffer 在缺页中断中也会阻塞。
int block_page_mkwrite(struct vm_area_struct *vma, struct vm_fault *vmf,
get_block_t get_block)
{
set_page_dirty(page);
wait_for_stable_page(page);
}
这里我们可以看到 MappedByteBuffer 在内核中是先变脏然后在对 page cache 进行写入,而 FileChannel 是先写入 page cache 后在变脏。
从此之后,通过 MappedByteBuffer 对 page cache 的写入就会变得非常丝滑,那么问题来了,当 page cache 中的脏页被内核异步回写之后,内核会把文件页中的脏页标记清除掉,那么这时如果 MappedByteBuffer 对 page cache 写入,由于不会发生缺页中断,那么 page cache 中的文件页如何再次变脏呢 ?
内核这里的设计非常巧妙,当内核回写完脏页之后,会调用 page_mkclean_one 函数清除文件页的脏页标记,在这里会首先通过 page_vma_mapped_walk 判断该文件页是不是被 mmap 映射到进程地址空间的,如果是,那么说明该文件页是被 MappedByteBuffer 映射的。随后内核就会做一些特殊处理:
-
通过 pte_wrprotect 对 MappedByteBuffer 在进程页表中对应的页表项 pte 进行写保护,变为只读权限。
-
通过 pte_mkclean 清除页表项上的脏页标记。
static bool page_mkclean_one(struct page *page, struct vm_area_struct *vma,
unsigned long address, void *arg)
{
while (page_vma_mapped_walk(&pvmw)) {
int ret = 0;
address = pvmw.address;
if (pvmw.pte) {
pte_t entry;
entry = ptep_clear_flush(vma, address, pte);
entry = pte_wrprotect(entry);
entry = pte_mkclean(entry);
set_pte_at(vma->vm_mm, address, pte, entry);
}
return true;
}
这样一来,在脏页回写完毕之后,MappedByteBuffer 在页表中就变成只读的了,这一切对用户态的我们都是透明的,当再次对 MappedByteBuffer 写入的时候就不是那么丝滑了,会触发写保护缺页中断(我们以为不会有缺页中断,其实是有的),在写保护中断的处理中,内核会重新将页表项 pte 变为可写,文件页标记为脏页。如果文件页正在回写,缺页中断会阻塞。如果脏页积累的太多,这里也会同步回写脏页。
static vm_fault_t wp_page_shared(struct vm_fault *vmf)
__releases(vmf->ptl)
{
if (vma->vm_ops && vma->vm_ops->page_mkwrite) {
// 设置页表项为可写
// 标记文件页为脏页
// 如果文件页正在回写则阻塞等待
tmp = do_page_mkwrite(vmf);
}
// 判断是否需要同步回写脏页,
fault_dirty_shared_page(vma, vmf->page);
return VM_FAULT_WRITE;
}
所以并不是对 MappedByteBuffer 调用 mlock 之后就万事大吉了,在遇到脏页回写的时候,MappedByteBuffer 依然会发生写保护类型的缺页中断。在缺页中断处理中会等待脏页的回写,并且还可能会发生脏页的同步回写。这对 MappedByteBuffer 的写入性能会有非常大的影响。
在明白这些问题之后,下面我们继续来看 MappedByteBuffer 和 FileChannel 在不同数据集下对文件的写入性能测试:
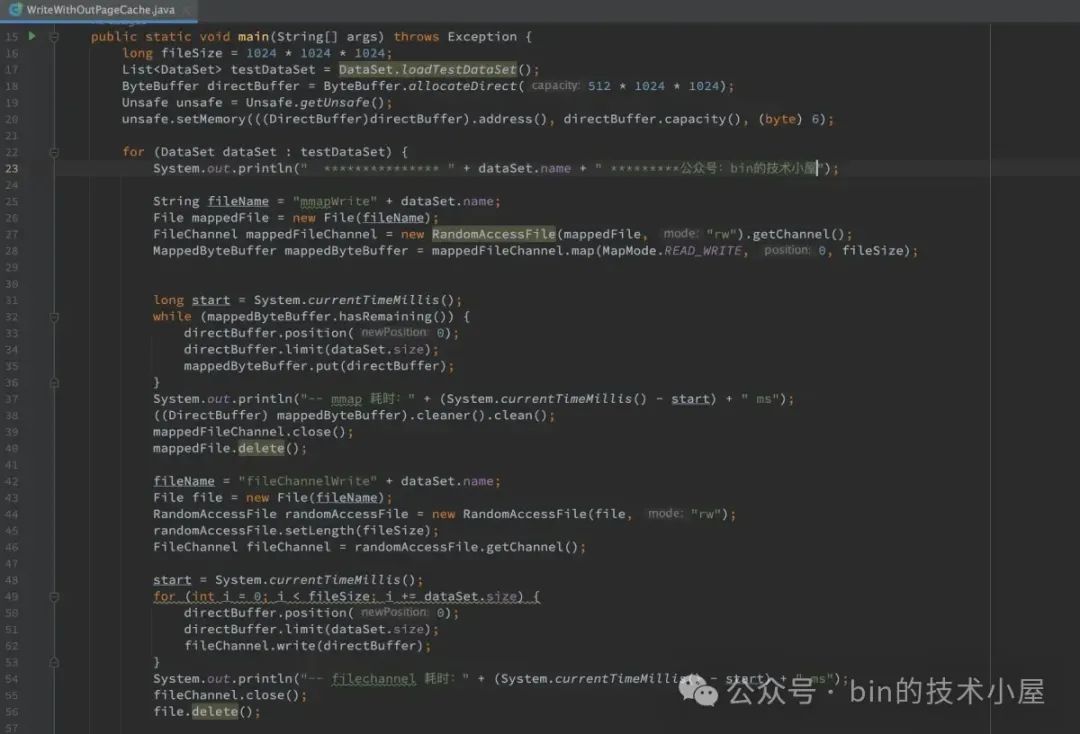
运行结果:
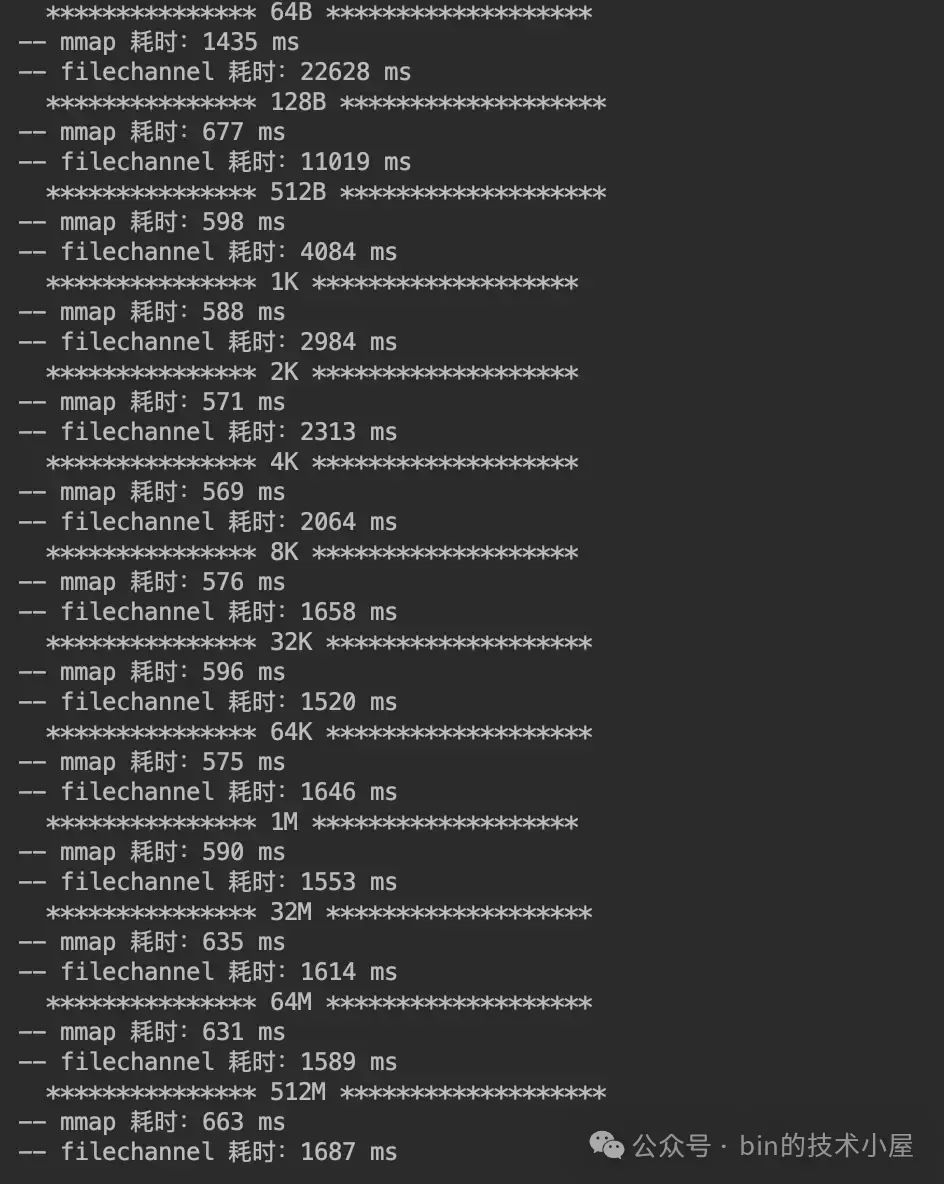
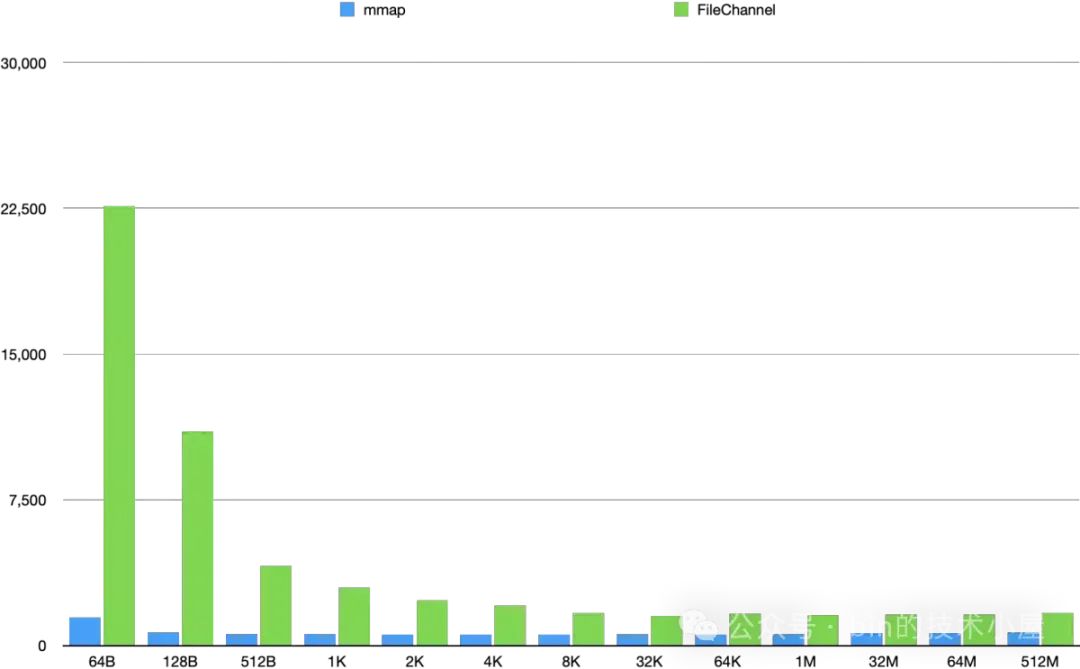
在笔者的测试环境中,我们看到 MappedByteBuffer 在对文件的写入性能一路碾压 FileChannel,并没有出现被 FileChannel 反超的情况。但我们看到 MappedByteBuffer 从 4K 开始写入性能是在逐渐下降的,而 FileChannel 的写入性能却在一路升高。
根据上面的分析,我们可以推断出,后面随着数据量的增大,由于 MappedByteBuffer 缺页中断瓶颈的影响,在 512M 后面某一个数据集下,FileChannel 的写入性能最终是会超过 MappedByteBuffer 的。
在本小节的开头,笔者就强调了,本小节值得参考的是 MappedByteBuffer 和 FileChannel 在不同数据集大小下的读写性能趋势走向,而不是具体的性能数值。
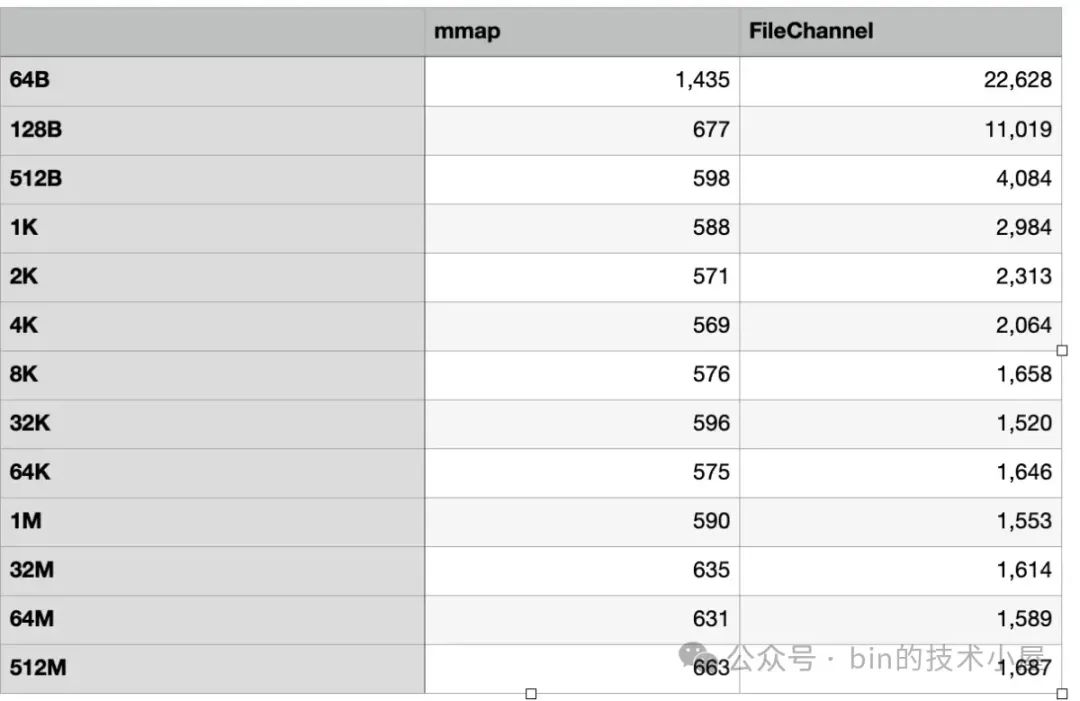
6. MappedByteBuffer 在 RocketMQ 中的应用
在 RocketMQ 的消息存储架构模型中有三个非常核心的文件,它们分别是:CommitLog,ConsumeQueue,IndexFile。其中 CommitLog 是消息真正存储的地方,而 ConsumeQueue 和 IndexFile 都是根据 CommitLog 生成的消息索引文件,它们包含了消息在 CommitLog 文件中的真实物理偏移。
6.1 CommitLog
当 Producer 将消息发送到 Broker 之后,RocketMQ 会根据消息的序列化协议将消息持久化到 CommitLog 文件中,一旦消息被刷到磁盘中,Producer 发送给 Broker 的消息就不会丢失了。CommitLog 文件存储的主体是消息的 body 以及相关的元数据,CommitLog 并不会区分消息的 Topic。也就是说在同一 Broker 实例中,所有 Topic 下的消息都会被顺序的写入 CommitLog 文件混合存储。
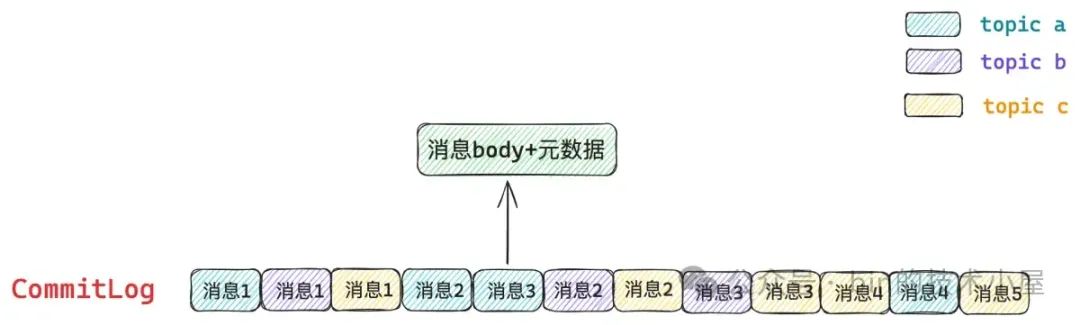
CommitLog 文件的默认大小为 1G,存储路径:/{storePathRootDir}/store/commitlog/{fileName}。文件的命名规则为 CommitLog 文件中存储消息的最小物理偏移,当一个 CommitLog 文件被写满之后,RocketMQ 就会创建一个新的 CommitLog 文件。
比如,第一个 CommitLog 文件会命名为 00000000000000000000,文件名一共 20 位,左边补零,剩余为消息在文件中的最小物理偏移,文件大小为 1G,表示第一个 CommitLog 文件中消息的最小物理偏移为 0 。
当第一个 CommitLog 文件被写满之后,第二个 CommitLog 文件就会被命名为 00000000001073741824(1G = 1073741824),表示第二个 CommitLog 文件中消息的最小物理偏移为 1073741824。后面第三个,第四个 CommitLog 文件的命名规则都是一样的,以此类推。
单个 Broker 实例下的每条消息的物理偏移是全局唯一的,而 CommitLog 文件的命名规则是根据消息的物理偏移依次递增的,所以给定一个消息的物理偏移,通过二分查找就能很快的定位到存储该消息的具体 CommitLog 文件。
6.2 ConsumeQueue
现在消息的存储解决了,但是消息的消费却成了难题,因为单个 Broker 实例下的所有 Topic 消息都是混合存储在 CommitLog 中,而 Consumer 是基于订阅的 Topic 进行消费的,这样一来,Consumer 想要消费具体 Topic 下的消息,就需要根据 Topic 来遍历 CommitLog 检索消息,这样效率是非常低下的。
因此就有必要为 Consumer 消费消息专门建立一个索引文件,这个索引文件就是 ConsumeQueue ,ConsumeQueue 可以看做是基于 Topic 的 CommitLog 索引文件 。
每个 Topic 下边包含多个 MessageQueue,该 Topic 下的所有消息会均匀的分布在各个 MessageQueue 中,有点像 Kafka 里的 Partition 概念。Producer 在向 Broker 发送消息的时候会指定该消息所属的 MessageQueue。每个 MessageQueue 下边会有多个 ConsumeQueue 文件,用于存储该队列中的消息在 CommitLog 中的索引。
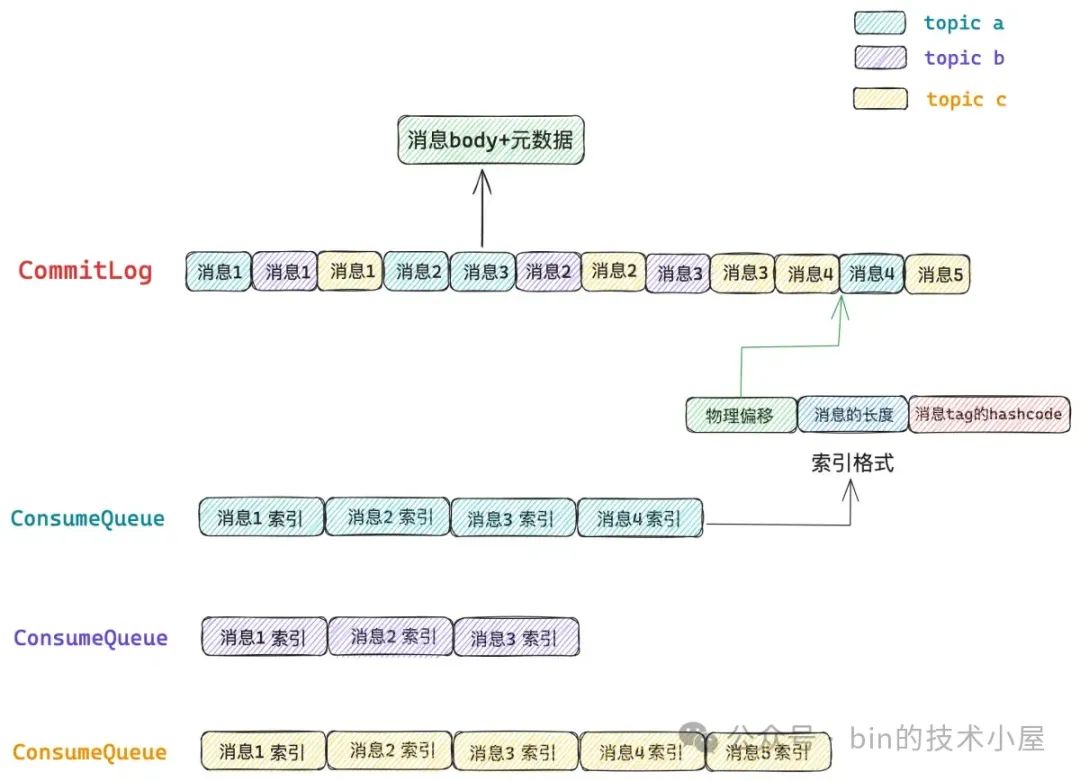
ConsumeQueue 文件的存储路径结构为:Topic/MessageQueue/ConsumeQueue,具体的存储路径是:/{storePathRootDir}/store/consumequeue/{topic}/{queueId}/{fileName},单个 ConsumeQueue 文件可以存储 30 万条消息索引,每条消息索引占用 20 个字节,分别是:消息在 CommitLog 中的物理偏移(8字节),消息的长度(4字节),消息 tag 的 hashcode(8字节)。每个 ConsumeQueue 文件大小约为 5.72M(30万 * 20 = 600 万字节)。
ConsumeQueue 文件的命名规则是消息索引在文件中的最小物理偏移,比如,每个 MessageQueue 下第一个 ConsumeQueue 文件会被命名为 00000000000000000000,文件大小为 5.72M。当第一个文件写满之后,就会创建第二个 ConsumeQueue 文件,命名为 00000000000006000000。这样依次类推。
RocketMQ 会启动一个叫做 ReputMessageService 的后台线程,每隔 1ms 执行一次,负责不停地从 CommitLog 中构建消息索引并写入到 ConsumeQueue 文件。而消息的索引一旦被构建到 ConsumeQueue 文件中之后,Consumer 就可以看到了。
消息索引在 ConsumeQueue 文件中的物理偏移我们称之为消息的逻辑偏移,ConsumerGroup 中保存的消费进度就是这个逻辑偏移,当 ConsumerGroup 根据当前保存的消费进度从 Broker 中拉取消息的时候,RocketMQ 就是先根据消息的这个逻辑偏移通过二分查找定位到消息索引所在的具体 ConsumeQueue 文件,然后从 ConsumeQueue 文件中读取消息索引,而消息索引中保存了该消息在 CommitLog 中的物理偏移,最后根据这个物理偏移从 CommitLog 中读取出具体的消息内容。
6.3 IndexFile
IndexFile 也是一种消息索引文件,同样也是由后台线程 ReputMessageService 来构建的,不同的是 IndexFile 是根据 CommitLog 中存储的消息 key 以及消息的存储时间来构建的消息索引文件,这样我们就可以通过消息 key 或者消息生产的时间来查找消息了。
IndexFile 索引文件可以看做是一个哈希表的结构,其中包含了 500 万个哈希槽(hashSlot),每个哈希槽占用 4 个字节,用来指向一个链表。在构建 IndexFile 的时候,会计算每一个消息 key 的 hashcode,然后通过 hashcode % hashSlotNum 定位哈希槽,如果遇到哈希槽冲突,就会将冲突的消息索引采用头插法插入到哈希槽指向的链表中,这样可以保证最新生产出来的消息位于链表的最前面。
消息索引就存放在各个哈希槽指向的这个链表中,按照消息的生产时间从近到远依次排列。一个 IndexFile 可以容纳 2000W 条消息索引,每条消息索引占用 20 个字节,分别是:消息 key 的 hashcode (4字节),消息在 CommitLog 中的物理偏移 Physical Offset (8字节),Time Diff(4字节),Next Index Pos(4字节)用于指向该消息索引在哈希链表中的下一个消息索引。这里的 Time Diff 指的是消息的存储时间与 beginTimestamp 的差值,而 beginTimestamp 表示的是 IndexFile 中所有消息的最小存储时间。
除此之外,在 IndexFile 的开头会有一个 40 字节大小的 indexHeader 头部,用于保存文件中关于消息索引的一些统计信息:
-
8 字节的 beginTimestamp 表示 IndexFile 中消息的最小存储时间
-
8 字节的 endTimestamp 表示 IndexFile 中消息的最大存储时间
-
8 字节的 beginPhyoffset 表示 IndexFile 中消息在 CommitLog 中的最小物理偏移
-
8 字节的 endPhyoffset 表示 IndexFile 中消息在 CommitLog 中的最大物理偏移
-
4 字节的 hashSlotcount 表示 IndexFile 中当前用到的哈希槽个数。
-
4 字节的 indexCount 表示 IndexFile 中目前保存的消息索引条数。
单个 IndexFile 的总大小为 :40 字节的 Header + 500 万 * 4 字节的哈希槽 + 2000 万 * 20 字节的消息索引 = 400 M。IndexFile 的命名规则是用创建文件时候的当前时间戳,存储路径为:/{storePathRootDir}/store/index/{fileName}。
我们首先会根据消息的生产时间通过二分查找的方式定位具体的 IndexFile,在通过消息 key 的 hashcode 定位到具体的消息索引,从消息索引中拿到 Physical Offset,最后在 CommitLog 中定位到具体的消息内容。
6.4 文件预热
RocketMQ 对于 CommitLog,ConsumeQueue,IndexFile 等文件的读写都是通过 MappedByteBuffer 来进行的,因此 RocketMQ 专门定义了一个用于描述内存文件映射的模型 —— MappedFile,其中封装了针对内存映射文件的所有操作。比如,文件的预热,文件的读写,文件的回写等操作。
public class DefaultMappedFile extends AbstractMappedFile {
protected FileChannel fileChannel;
protected MappedByteBuffer mappedByteBuffer;
private void init(final String fileName, final int fileSize) throws IOException {
this.fileName = fileName;
this.fileSize = fileSize;
this.file = new File(fileName);
this.fileChannel = new RandomAccessFile(this.file, "rw").getChannel();
this.mappedByteBuffer = this.fileChannel.map(MapMode.READ_WRITE, 0, fileSize);
}
}
通过 fileChannel.map 映射出来的 mappedByteBuffer 只是一段虚拟内存,背后并未与任何物理内存发生关联(文件的 page cache), 后续在读写这段 mappedByteBuffer 的时候就会产生缺页中断的开销,对文件的读写性能产生比较大的影响。
所以 RocketMQ 为了最大化文件读写的性能而提供了文件预热的功能,文件预热在默认情况下是关闭的,如果需要可以在 Broker 的配置文件中开启 warmMapedFileEnable。
warmMapedFileEnable=true
当 warmMapedFileEnable 开启之后,RocketMQ 在初始化完 MappedFile 之后,就会调用 warmMappedFile 函数对文件进行预热:
-
对 mappedByteBuffer 这段虚拟内存范围内的虚拟内存按照内存页为单位,逐个触发缺页中断,目的是提前讲映射文件的内容加载到 page cache 中,并在进程页表中建立好 mappedByteBuffer 与 page cache 的映射关系。
-
使用前面介绍的 mlock 系统调用将 mappedByteBuffer 背后映射的 page cache 锁定在内存中,不允许内核 swap。
-
使用 madvise 系统调用再次触发一次预读,感觉这里完全没必要调用 madvise,甚至也没必要进行步骤 1。只调用 mlock 就可以了,因为内核在执行 mlock 的过程中步骤 1 和步骤 3 的事情就都顺便做了。不清楚 RocketMQ 这里为什么要有这么多重复的不必要动作,可能是为了兼容不同的操作系统以及不同版本的内核吧,这里我们就不深入去探究了。
public void warmMappedFile(FlushDiskType type, int pages) {
ByteBuffer byteBuffer = this.mappedByteBuffer.slice();
for (long i = 0, j = 0; i < this.fileSize; i += DefaultMappedFile.OS_PAGE_SIZE, j++) {
byteBuffer.put((int) i, (byte) 0);
}
this.mlock();
}
public void mlock() {
final long address = ((DirectBuffer) (this.mappedByteBuffer)).address();
Pointer pointer = new Pointer(address);
{
int ret = LibC.INSTANCE.mlock(pointer, new NativeLong(this.fileSize));
}
{
int ret = LibC.INSTANCE.madvise(pointer, new NativeLong(this.fileSize), LibC.MADV_WILLNEED);
}
}
6.5 读写分离
再对文件进行预热之后,后续对 mappedByteBuffer 的读写就是直接读写 page cache 了,整个过程没有系统调用也没有数据拷贝的开销,经过本文第五小节的分析我们知道 mappedByteBuffer 非常适合频繁小数据量的文件读写场景,而 RocketMQ 主要处理的是业务消息,通常这些业务消息不会很大,所以 RocketMQ 选择 mappedByteBuffer 来读写文件实在是太合适了。
但是如果我们通过 mappedByteBuffer 来高频地不断向 CommitLog 写入消息的话, page cache 中的脏页比例就会越来越大,而 page cache 回写脏页的时机是由内核来控制的,当脏页积累到一定程度,内核就会启动 pdflush 线程来将 page cache 中的脏页回写到磁盘中。
虽然现在 page cache 已经被我们 mlock 住了,但是我们在用户态无法控制脏页的回写,当脏页回写完毕之后,我们通过 mappedByteBuffer 写入文件时仍然会触发写保护缺页中断。这样也会加大 mappedByteBuffer 的写入延迟,产生性能毛刺。
为了避免这种写入毛刺的产生,RocketMQ 引入了读写分离的机制,默认是关闭的,可以通过 transientStorePoolEnable 开启。
transientStorePoolEnable=true
在开启读写分离之后,RocketMQ 会初始化一个堆外内存池 transientStorePool,随后从这个堆外内存池中获取一个 DirectByteBuffer(writeBuffer)来初始化 MappedFile。
public class DefaultMappedFile extends AbstractMappedFile {
/**
* Message will put to here first, and then reput to FileChannel if writeBuffer is not null.
*/
protected ByteBuffer writeBuffer = null;
protected TransientStorePool transientStorePool = null;
@Override
public void init(final String fileName, final int fileSize,
final TransientStorePool transientStorePool) throws IOException {
init(fileName, fileSize);
// 用于暂存数据的 directBuffer
this.writeBuffer = transientStorePool.borrowBuffer();
// 堆外内存池
this.transientStorePool = transientStorePool;
}
}
后续 Broker 再对 CommitLog 写入消息的时候,首先会写到 writeBuffer 中,因为 writeBuffer 只是一段普通的堆外内存,不会涉及到脏页回写,因此 CommitLog 的写入过程就会非常平滑,不会有性能毛刺。而从 CommitLog 读取消息的时候仍然是通过 mappedByteBuffer 进行。
public AppendMessageResult appendMessagesInner(final MessageExt messageExt, final AppendMessageCallback cb,
PutMessageContext putMessageContext) {
// 开启读写分离之后获取到的是 writeBuffer,否则获取 mappedByteBuffer
ByteBuffer byteBuffer = appendMessageBuffer().slice();
byteBuffer.position(currentPos);
// 将消息写入到 byteBuffer 中
result = cb.doAppend(this.getFileFromOffset(), byteBuffer, this.fileSize - currentPos,
(MessageExtBatch) messageExt, putMessageContext);
}
protected ByteBuffer appendMessageBuffer() {
return writeBuffer != null ? writeBuffer : this.mappedByteBuffer;
}
消息数据现在只是暂存在 writeBuffer 中,当积攒的数据超过了 16K(可通过 commitCommitLogLeastPages 配置),或者消息在 writeBuffer 中停留时间超过了 200 ms(可通过 commitCommitLogThoroughInterval 配置)。
private int commitCommitLogThoroughInterval = 200;
private int commitCommitLogLeastPages = 4
protected boolean isAbleToCommit(final int commitLeastPages) {
if (commitLeastPages > 0) {
// writeBuffer 中积攒的数据超过了 16 k,开始 commit
return ((write / OS_PAGE_SIZE) - (commit / OS_PAGE_SIZE)) >= commitLeastPages;
}
return write > commit;
}
那么 RocketMQ 就会将 writeBuffer 中的消息数据通过 FileChannel 一次性批量异步写入到 page cache 中。
public int commit(final int commitLeastPages) {
if (this.isAbleToCommit(commitLeastPages)) {
this.fileChannel.write(byteBuffer);
}
}
既然 RocketMQ 在读写分离模式下设计的是通过 FileChannel 来批量写入消息,那么就需要考虑 FileChannel 的最佳写入性能点,这里 RocketMQ 选择了 16K,而我们在本文第五小节中测试的 FileChannel 最佳写入性能点也差不多是在 32K 附近,而且写入性能是要比 MappedByteBuffer 高很多的。
6.6 文件刷盘
无论是通过 MappedByteBuffer 还是 FileChannel 对文件进行写入,当系统中的脏页积累到一定量的时候,都会对其写入文件的性能造成非常大的影响。另外脏页不及时回写还会造成数据丢失的风险。
因此为了避免数据丢失的风险以及对写入性能的影响,当脏页在 page cache 中积累到 16K 或者脏页在 page cache 中停留时间超过 10s 的时候,RocketMQ 就会通过 force 方法将脏页回写到磁盘中。
private int flushCommitLogLeastPages = 4;
private int flushCommitLogThoroughInterval = 1000 * 10;
private boolean isAbleToFlush(final int flushLeastPages) {
if (flushLeastPages > 0) {
return ((write / OS_PAGE_SIZE) - (flush / OS_PAGE_SIZE)) >= flushLeastPages;
}
return write > flush;
}
public int flush(final int flushLeastPages) {
if (this.isAbleToFlush(flushLeastPages)) {
if (writeBuffer != null || this.fileChannel.position() != 0) {
this.fileChannel.force(false);
} else {
this.mappedByteBuffer.force();
}
}
}
总结
本文从 OS 内核,JVM ,中间件应用三个视角带着大家全面深入地拆解了一下关于 MappedByteBuffer 的方方面面,在文章的开始,我们先是在 OS 内核的视角下,分别从私有文件映射,共享文件映射两个方面,介绍了 MappedByteBuffer 的映射过程以及缺页处理。还原了 MappedByteBuffer 最为本质的面貌。
在此基础之上,我们来到了 JVM 的视角,介绍了 JDK 如何对系统调用 mmap 进行一步一步的封装,并介绍了很多映射的细节,比如经常被误解的 System,gc 之后到底发生了什么,真的是无法预测吗 ?
随后笔者接着为大家介绍了和 MappedByteBuffer 相关的几个系统调用:madvise , mlock , msync,并详细的分析了他们在内核中的源码实现。
最后笔者从映射文件数据在与不在 page cache 中这两个角度,详细对比了 MappedByteBuffer 与 FileChannel 在文件读写上的性能差异,并从内核的角度分析了具体导致两者性能差异的原因。
在文章的结尾,笔者以 RocketMQ 为例,介绍了 MappedByteBuffer 在中间件中的应用。好了,今天的内容就到这里,我们下篇文章见~~~