
揭秘Linux 高性能服务 epoll 的本质转载
导语
epoll接口是为解决Linux内核处理大量文件描述符而提出的方案。该接口属于Linux下多路I/O复用接口中select/poll的增强。其经常应用于Linux下高并发服务型程序,特别是在大量并发连接中只有少部分连接处于活跃下的情况 (通常是这种情况),在该情况下能显著的提高程序的CPU利用率。本篇详细解读了epoll的用法,希望大家能有所收获!
正文
设想一个场景:有100万用户同时与一个进程保持着TCP连接,而每一时刻只有几十个或几百个TCP连接是活跃的(接收TCP包),也就是说在每一时刻进程只需要处理这100万连接中的一小部分连接。那么,如何才能高效的处理这种场景呢?进程是否在每次询问操作系统收集有事件发生的TCP连接时,把这100万个连接告诉操作系统,然后由操作系统找出其中有事件发生的几百个连接呢?实际上,在 Linux2.4 版本以前,那时的select 或者 poll 事件驱动方式是这样做的。
这里有个非常明显的问题,即在某一时刻,进程收集有事件的连接时,其实这100万连接中的大部分都是没有事件发生的。因此如果每次收集事件时,都把100万连接的套接字传给操作系统(这首先是用户态内存到内核态内存的大量复制),而由操作系统内核寻找这些连接上有没有未处理的事件,将会是巨大的资源浪费,然后select和poll就是这样做的,因此它们最多只能处理几千个并发连接。而epoll不这样做,它在Linux内核中申请了一个简易的文件系统,把原先的一个select或poll调用分成了3部分:
int epoll_create(int size);
int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event);
int epoll_wait(int epfd, struct epoll_event *events,int maxevents, int timeout);1、调用 epoll_create 建立一个 epoll 对象(在epoll文件系统中给这个句柄分配资源);
2、调用 epoll_ctl 向 epoll 对象中添加这100万个连接的套接字;
3、调用 epoll_wait 收集发生事件的连接。
这样只需要在进程启动时建立 1 个 epoll 对象,并在需要的时候向它添加或删除连接就可以了,因此,在实际收集事件时,epoll_wait 的效率就会非常高,因为调用 epoll_wait 时并没有向它传递这100万个连接,内核也不需要去遍历全部的连接。
一、epoll原理详解
当某一进程调用 epoll_create 方法时,Linux 内核会创建一个 eventpoll 结构体,这个结构体中有两个成员与epoll的使用方式密切相关,如下所示:
struct eventpoll {
...
/*红黑树的根节点,这棵树中存储着所有添加到epoll中的事件,
也就是这个epoll监控的事件*/
struct rb_root rbr;
/*双向链表rdllist保存着将要通过epoll_wait返回给用户的、满足条件的事件*/
struct list_head rdllist;
...
};
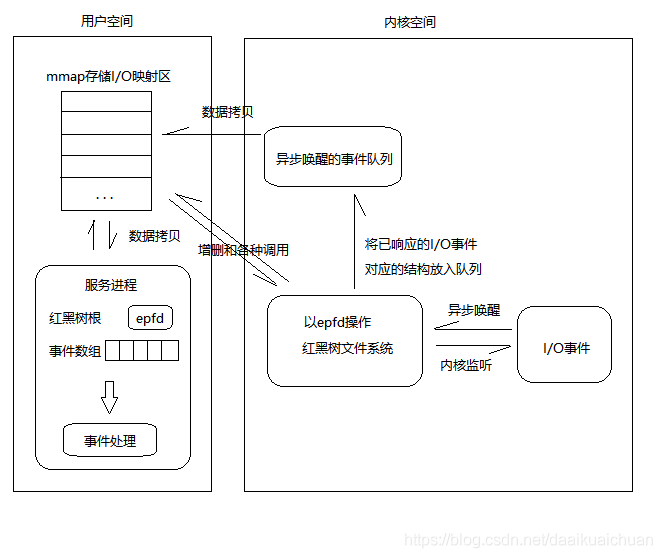
我们在调用 epoll_create 时,内核除了帮我们在 epoll 文件系统里建了个 file 结点,在内核 cache 里建了个红黑树用于存储以后 epoll_ctl 传来的 socket 外,还会再建立一个 rdllist 双向链表,用于存储准备就绪的事件,当 epoll_wait 调用时,仅仅观察这个 rdllist 双向链表里有没有数据即可。有数据就返回,没有数据就 sleep,等到 timeout 时间到后即使链表没数据也返回。所以,epoll_wait 非常高效。
所有添加到epoll中的事件都会与设备(如网卡)驱动程序建立回调关系,也就是说相应事件的发生时会调用这里的回调方法。这个回调方法在内核中叫做ep_poll_callback,它会把这样的事件放到上面的rdllist双向链表中。
在epoll中对于每一个事件都会建立一个epitem结构体,如下所示:
struct epitem {
...
//红黑树节点
struct rb_node rbn;
//双向链表节点
struct list_head rdllink;
//事件句柄等信息
struct epoll_filefd ffd;
//指向其所属的eventepoll对象
struct eventpoll *ep;
//期待的事件类型
struct epoll_event event;
...
}; // 这里包含每一个事件对应着的信息。
当调用 epoll_wait 检查是否有发生事件的连接时,只是检查eventpoll对象中的rdllist双向链表是否有epitem元素而已,如果rdllist链表不为空,则这里的事件复制到用户态内存(使用共享内存提高效率)中,同时将事件数量返回给用户。因此epoll_waitx效率非常高。epoll_ctl在向epoll对象中添加、修改、删除事件时,从rbr红黑树中查找事件也非常快,也就是说epoll是非常高效的,它可以轻易地处理百万级别的并发连接。

【总结】:
一颗红黑树,一张准备就绪句柄链表,少量的内核cache,就帮我们解决了大并发下的socket处理问题。
执行 epoll_create() 时,创建了红黑树和就绪链表;
执行 epoll_ctl() 时,如果增加 socket 句柄,则检查在红黑树中是否存在,存在立即返回,不存在则添加到树干上,然后向内核注册回调函数,用于当中断事件来临时向准备就绪链表中插入数据;
执行 epoll_wait() 时立刻返回准备就绪链表里的数据即可。
二、epoll 的两种触发模式
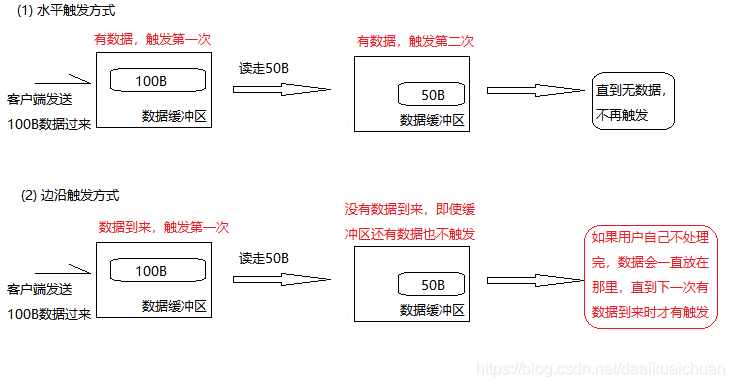
epoll有EPOLLLT和EPOLLET两种触发模式,LT是默认的模式,ET是“高速”模式。
- LT(水平触发)模式下,只要这个文件描述符还有数据可读,每次 epoll_wait都会返回它的事件,提醒用户程序去操作;
- ET(边缘触发)模式下,在它检测到有 I/O 事件时,通过 epoll_wait 调用会得到有事件通知的文件描述符,对于每一个被通知的文件描述符,如可读,则必须将该文件描述符一直读到空,让 errno 返回 EAGAIN 为止,否则下次的 epoll_wait 不会返回余下的数据,会丢掉事件。
如果ET模式不是非阻塞的,那这个一直读或一直写势必会在最后一次阻塞。
还有一个特点是,epoll使用“事件”的就绪通知方式,通过epoll_ctl注册fd,一旦该fd就绪,内核就会采用类似callback的回调机制来激活该fd,epoll_wait便可以收到通知。
【epoll为什么要有EPOLLET触发模式?】:
如果采用 EPOLLLT 模式的话,系统中一旦有大量你不需要读写的就绪文件描述符,它们每次调用epoll_wait都会返回,这样会大大降低处理程序检索自己关心的就绪文件描述符的效率.。而采用EPOLLET这种边缘触发模式的话,当被监控的文件描述符上有可读写事件发生时,epoll_wait()会通知处理程序去读写。如果这次没有把数据全部读写完(如读写缓冲区太小),那么下次调用epoll_wait()时,它不会通知你,也就是它只会通知你一次,直到该文件描述符上出现第二次可读写事件才会通知你!!!这种模式比水平触发效率高,系统不会充斥大量你不关心的就绪文件描述符。
【总结】:
ET模式(边缘触发)只有数据到来才触发,不管缓存区中是否还有数据,缓冲区剩余未读尽的数据不会导致epoll_wait返回;
LT 模式(水平触发,默认)只要有数据都会触发,缓冲区剩余未读尽的数据会导致epoll_wait返回。
三、epoll反应堆模型
【epoll模型原来的流程】:
epoll_create(); // 创建监听红黑树
epoll_ctl(); // 向书上添加监听fd
epoll_wait(); // 监听
有监听fd事件发送--->返回监听满足数组--->判断返回数组元素--->
lfd满足accept--->返回cfd---->read()读数据--->write()给客户端回应。
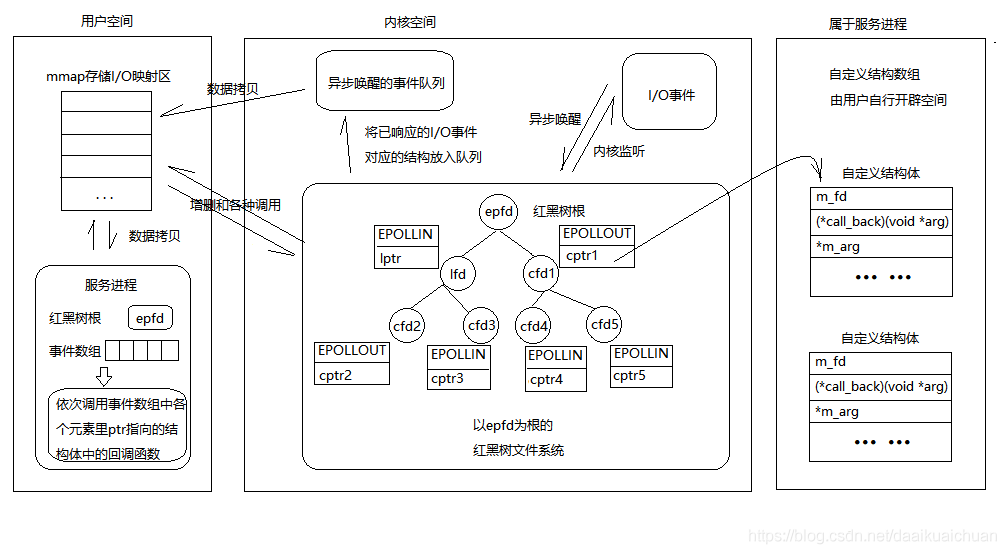
【epoll反应堆模型的流程】:
epoll_create(); // 创建监听红黑树
epoll_ctl(); // 向书上添加监听fd
epoll_wait(); // 监听
有客户端连接上来--->lfd调用acceptconn()--->将cfd挂载到红黑树上监听其读事件--->
epoll_wait()返回cfd--->cfd回调recvdata()--->将cfd摘下来监听写事件--->
epoll_wait()返回cfd--->cfd回调senddata()--->将cfd摘下来监听读事件--->...--->
【Demo】:
#include <stdio.h>
#include <sys/socket.h>
#include <sys/epoll.h>
#include <arpa/inet.h>
#include <fcntl.h>
#include <unistd.h>
#include <errno.h>
#include <string.h>
#include <stdlib.h>
#include <time.h>
#define MAX_EVENTS 1024 /*监听上限*/
#define BUFLEN 4096 /*缓存区大小*/
#define SERV_PORT 6666 /*端口号*/
void recvdata(int fd,int events,void *arg);
void senddata(int fd,int events,void *arg);
/*描述就绪文件描述符的相关信息*/
struct myevent_s
{
int fd; //要监听的文件描述符
int events; //对应的监听事件,EPOLLIN和EPLLOUT
void *arg; //指向自己结构体指针
void (*call_back)(int fd,int events,void *arg); //回调函数
int status; //是否在监听:1->在红黑树上(监听), 0->不在(不监听)
char buf[BUFLEN];
int len;
long last_active; //记录每次加入红黑树 g_efd 的时间值
};
int g_efd; //全局变量,作为红黑树根
struct myevent_s g_events[MAX_EVENTS+1]; //自定义结构体类型数组. +1-->listen fd
/*
* 封装一个自定义事件,包括fd,这个fd的回调函数,还有一个额外的参数项
* 注意:在封装这个事件的时候,为这个事件指明了回调函数,一般来说,一个fd只对一个特定的事件
* 感兴趣,当这个事件发生的时候,就调用这个回调函数
*/
void eventset(struct myevent_s *ev, int fd, void (*call_back)(int fd,int events,void *arg), void *arg)
{
ev->fd = fd;
ev->call_back = call_back;
ev->events = 0;
ev->arg = arg;
ev->status = 0;
if(ev->len <= 0)
{
memset(ev->buf, 0, sizeof(ev->buf));
ev->len = 0;
}
ev->last_active = time(NULL); //调用eventset函数的时间
return;
}
/* 向 epoll监听的红黑树 添加一个文件描述符 */
void eventadd(int efd, int events, struct myevent_s *ev)
{
struct epoll_event epv={0, {0}};
int op = 0;
epv.data.ptr = ev; // ptr指向一个结构体(之前的epoll模型红黑树上挂载的是文件描述符cfd和lfd,现在是ptr指针)
epv.events = ev->events = events; //EPOLLIN 或 EPOLLOUT
if(ev->status == 0) //status 说明文件描述符是否在红黑树上 0不在,1 在
{
op = EPOLL_CTL_ADD; //将其加入红黑树 g_efd, 并将status置1
ev->status = 1;
}
if(epoll_ctl(efd, op, ev->fd, &epv) < 0) // 添加一个节点
printf("event add failed [fd=%d],events[%d]\n", ev->fd, events);
else
printf("event add OK [fd=%d],events[%0X]\n", ev->fd, events);
return;
}
/* 从epoll 监听的 红黑树中删除一个文件描述符*/
void eventdel(int efd,struct myevent_s *ev)
{
struct epoll_event epv = {0, {0}};
if(ev->status != 1) //如果fd没有添加到监听树上,就不用删除,直接返回
return;
epv.data.ptr = NULL;
ev->status = 0;
epoll_ctl(efd, EPOLL_CTL_DEL, ev->fd, &epv);
return;
}
/* 当有文件描述符就绪, epoll返回, 调用该函数与客户端建立链接 */
void acceptconn(int lfd,int events,void *arg)
{
struct sockaddr_in cin;
socklen_t len = sizeof(cin);
int cfd, i;
if((cfd = accept(lfd, (struct sockaddr *)&cin, &len)) == -1)
{
if(errno != EAGAIN && errno != EINTR)
{
sleep(1);
}
printf("%s:accept,%s\n",__func__, strerror(errno));
return;
}
do
{
for(i = 0; i < MAX_EVENTS; i++) //从全局数组g_events中找一个空闲元素,类似于select中找值为-1的元素
{
if(g_events[i].status ==0)
break;
}
if(i == MAX_EVENTS) // 超出连接数上限
{
printf("%s: max connect limit[%d]\n", __func__, MAX_EVENTS);
break;
}
int flag = 0;
if((flag = fcntl(cfd, F_SETFL, O_NONBLOCK)) < 0) //将cfd也设置为非阻塞
{
printf("%s: fcntl nonblocking failed, %s\n", __func__, strerror(errno));
break;
}
eventset(&g_events[i], cfd, recvdata, &g_events[i]); //找到合适的节点之后,将其添加到监听树中,并监听读事件
eventadd(g_efd, EPOLLIN, &g_events[i]);
}while(0);
printf("new connect[%s:%d],[time:%ld],pos[%d]",inet_ntoa(cin.sin_addr), ntohs(cin.sin_port), g_events[i].last_active, i);
return;
}
/*读取客户端发过来的数据的函数*/
void recvdata(int fd, int events, void *arg)
{
struct myevent_s *ev = (struct myevent_s *)arg;
int len;
len = recv(fd, ev->buf, sizeof(ev->buf), 0); //读取客户端发过来的数据
eventdel(g_efd, ev); //将该节点从红黑树上摘除
if (len > 0)
{
ev->len = len;
ev->buf[len] = '\0'; //手动添加字符串结束标记
printf("C[%d]:%s\n", fd, ev->buf);
eventset(ev, fd, senddata, ev); //设置该fd对应的回调函数为senddata
eventadd(g_efd, EPOLLOUT, ev); //将fd加入红黑树g_efd中,监听其写事件
}
else if (len == 0)
{
close(ev->fd);
/* ev-g_events 地址相减得到偏移元素位置 */
printf("[fd=%d] pos[%ld], closed\n", fd, ev-g_events);
}
else
{
close(ev->fd);
printf("recv[fd=%d] error[%d]:%s\n", fd, errno, strerror(errno));
}
return;
}
/*发送给客户端数据*/
void senddata(int fd, int events, void *arg)
{
struct myevent_s *ev = (struct myevent_s *)arg;
int len;
len = send(fd, ev->buf, ev->len, 0); //直接将数据回射给客户端
eventdel(g_efd, ev); //从红黑树g_efd中移除
if (len > 0)
{
printf("send[fd=%d], [%d]%s\n", fd, len, ev->buf);
eventset(ev, fd, recvdata, ev); //将该fd的回调函数改为recvdata
eventadd(g_efd, EPOLLIN, ev); //重新添加到红黑树上,设为监听读事件
}
else
{
close(ev->fd); //关闭链接
printf("send[fd=%d] error %s\n", fd, strerror(errno));
}
return ;
}
/*创建 socket, 初始化lfd */
void initlistensocket(int efd, short port)
{
struct sockaddr_in sin;
int lfd = socket(AF_INET, SOCK_STREAM, 0);
fcntl(lfd, F_SETFL, O_NONBLOCK); //将socket设为非阻塞
memset(&sin, 0, sizeof(sin)); //bzero(&sin, sizeof(sin))
sin.sin_family = AF_INET;
sin.sin_addr.s_addr = INADDR_ANY;
sin.sin_port = htons(port);
bind(lfd, (struct sockaddr *)&sin, sizeof(sin));
listen(lfd, 20);
/* void eventset(struct myevent_s *ev, int fd, void (*call_back)(int, int, void *), void *arg); */
eventset(&g_events[MAX_EVENTS], lfd, acceptconn, &g_events[MAX_EVENTS]);
/* void eventadd(int efd, int events, struct myevent_s *ev) */
eventadd(efd, EPOLLIN, &g_events[MAX_EVENTS]); //将lfd添加到监听树上,监听读事件
return;
}
int main()
{
int port=SERV_PORT;
g_efd = epoll_create(MAX_EVENTS + 1); //创建红黑树,返回给全局 g_efd
if(g_efd <= 0)
printf("create efd in %s err %s\n", __func__, strerror(errno));
initlistensocket(g_efd, port); //初始化监听socket
struct epoll_event events[MAX_EVENTS + 1]; //定义这个结构体数组,用来接收epoll_wait传出的满足监听事件的fd结构体
printf("server running:port[%d]\n", port);
int checkpos = 0;
int i;
while(1)
{
/* long now = time(NULL);
for(i=0; i < 100; i++, checkpos++)
{
if(checkpos == MAX_EVENTS);
checkpos = 0;
if(g_events[checkpos].status != 1)
continue;
long duration = now -g_events[checkpos].last_active;
if(duration >= 60)
{
close(g_events[checkpos].fd);
printf("[fd=%d] timeout\n", g_events[checkpos].fd);
eventdel(g_efd, &g_events[checkpos]);
}
} */
//调用eppoll_wait等待接入的客户端事件,epoll_wait传出的是满足监听条件的那些fd的struct epoll_event类型
int nfd = epoll_wait(g_efd, events, MAX_EVENTS+1, 1000);
if (nfd < 0)
{
printf("epoll_wait error, exit\n");
exit(-1);
}
for(i = 0; i < nfd; i++)
{
//evtAdd()函数中,添加到监听树中监听事件的时候将myevents_t结构体类型给了ptr指针
//这里epoll_wait返回的时候,同样会返回对应fd的myevents_t类型的指针
struct myevent_s *ev = (struct myevent_s *)events[i].data.ptr;
//如果监听的是读事件,并返回的是读事件
if((events[i].events & EPOLLIN) &&(ev->events & EPOLLIN))
{
ev->call_back(ev->fd, events[i].events, ev->arg);
}
//如果监听的是写事件,并返回的是写事件
if((events[i].events & EPOLLOUT) && (ev->events & EPOLLOUT))
{
ev->call_back(ev->fd, events[i].events, ev->arg);
}
}
}
return 0;
}

